O pereche de forțe în avion și momentul acestuia. Ce este o pereche de forțe? Care este momentul perechii? Rezolvarea problemelor pentru determinarea reacțiilor de sprijin
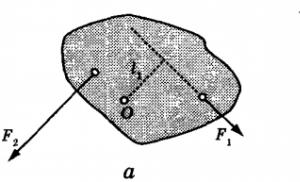
Cu câteva forțe se numește sistem de două forțe egale ca mărime, paralele și direcționate în direcții opuse, care acționează asupra unui corp rigid (fig. 17).
Se numește planul care conține liniile de acțiune ale forțelor perechii planul de acţiune al forţelor perechii ... Se numește distanța cea mai scurtă dintre liniile de acțiune ale forțelor unei perechi pereche de umeri .
Acțiunea de rotație a unei perechi asupra unui solid depinde de modulul de forțe al perechii, brațului, poziția planului de acțiune al perechii și direcția de rotație.
Măsura acestei acțiuni a unei perechi este momentul ei vector. Dacă toate forțele și perechile aplicate corpului se află în același plan, atunci momentul perechii poate fi considerat o mărime algebrică egală cu
Se ia în considerare momentul perechii pozitiv dacă tinde să rotească corpul în sens invers acelor de ceasornic şi negativ , dacă - în sensul acelor de ceasornic.
Momentul perechii, ca și momentul forței, se măsoară în (sistemul SI) și în (sistemul MKGSS).
Suma algebrică a momentelor de forță ale unei perechi față de un punct arbitrar din planul acțiunii sale nu depinde de alegerea acestui punct și este egală cu momentul perechii. Într-adevăr, să determinăm suma momentelor de forță și perechea (Fig. 18) relativ la un punct arbitrar situat în planul de acțiune al perechii.
Din moment ce, obținem:
Dacă forțele și perechile aplicate corpului se află în planuri diferite, atunci momentul perechii, ca și momentul forței, trebuie considerat ca un vector. În acest sens, introducem o definiție generală a momentului unei perechi.
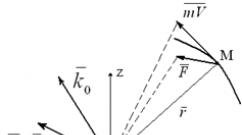
Un moment de cuplu este un vector egal ca mărime cu produsul modulului forțelor perechii pe umărul său și direcționat perpendicular pe planul de acțiune în direcția din care se vede că are loc rotația pe care perechea încearcă să o imprime corpului. în sens invers acelor de ceasornic (Fig. 17).
Modulul vectorului este
Din definiția vectorilor și rezultă că momentul perechii (Fig. 17) este egal ca mărime și direcție cu momentul oricăreia dintre forțele perechii (de exemplu,) relativ la punctul de aplicare al celeilalte , acesta este
Folosind formula 16, avem:
Astfel, momentul unei perechi poate fi reprezentat sub forma unui produs vectorial (23), în care se află vectorul rază a punctului de aplicare a forței relativ la punctul de aplicare a forței (Fig. 17).
Proprietăți de pereche sunt exprimate prin următoarele teoreme, care sunt prezentate aici fără dovezi.
1) Acțiunea unei perechi asupra unui corp rigid nu se va schimba dacă perechea este mutată în planul acțiunii sale în orice altă poziție.
2) Acțiunea unei perechi asupra unui corp rigid nu se va modifica dacă se modifică modulul de forțe al perechii și al umărului acesteia, astfel încât modulul momentului perechii rămâne neschimbat.
3) Acțiunea unei perechi asupra unui corp solid nu se va schimba dacă perechea este transferată în orice alt plan paralel cu planul acțiunii sale.
4) Un sistem de perechi aplicat unui corp rigid poate fi înlocuit cu o pereche rezultată cu un moment egal cu suma geometrică a momentelor perechilor adăugate:
Din teoreme rezultă că o pereche exprimată printr-un vector într-un solid poate fi transferată după cum se dorește în planul de acțiune al perechii, precum și transferată în orice plan paralel; prin urmare momentul perechii este un vector liber , adică poate fi descris ca fiind atașat la orice punct al unui corp rigid.
Întrebări de autotest pentru secțiunea 2
1. Determinați momentul forței relativ la un punct ca mărime algebrică, ca vector.
2. În ce caz momentul forței în jurul unui punct este egal cu zero?
3. Ce se numește momentul de forță în jurul axei?
4. În ce cazuri momentul de forță în jurul axei este egal cu zero?
5. Este posibilă deschiderea unei uși dacă toate forțele aplicate acesteia sunt situate în planul ușii?
6. Care este relația dintre momentele de forță în jurul unei axe și despre un punct situat pe această axă?
7. Deduceți formule pentru momentele de forță relativ la trei axe de coordonate, folosind reprezentarea vectorului momentului de forță relativ la un punct sub forma unui produs încrucișat.
8. Ce se numește o pereche de forțe? Care este momentul perechii?
9. Ce factori determină efectul unei perechi asupra unui solid?
10. Cum se aplică direcția, unde se aplică vectorul moment al perechii?
11. Formulați condiția de echilibru pentru sistemul de perechi de forțe aplicate unui corp rigid.
12. Dacă două perechi de forțe situate în planuri paralele se pot echilibra între ele; în planuri care se intersectează?
13. Cum pot fi modificate umărul și modulul de forță al unei perechi fără a modifica efectul perechii asupra unui corp rigid?
14. Cum se adună perechile care se află în același plan; în planuri care se intersectează?
Un sistem de două forțe de modul egal, paralele și direcționate în direcții opuse, care acționează asupra unui corp absolut rigid. Acțiunea unei perechi de forțe asupra unui corp rigid se reduce la un efect de rotație, care se caracterizează prin valoarea - momentul perechii.
Este definit:
Modulul său = F * d. d - distanta dintre liniile de actiune a fortelor perechii, numita umarul perechii.
Poziția în spațiu a planului de acțiune al perechii.
Direcția de rotație a perechii în acest plan.
Un moment de două forțe- vector m (sau M), al cărui modul este egal cu produsul dintre modulul uneia dintre forțele perechii, pe umărul său, și care este îndreptat perpendicular pe planul de acțiune al perechii în direcția din care se vede perechea tinde să rotească corpul în sens invers acelor de ceasornic.
Două perechi culcate în || plane și care au același moment sunt echivalente.
Toate perechile din planurile care se intersectează pot fi înlocuite cu o pereche cu un moment egal cu suma momentelor acestor perechi. Pentru abur absolut solid- vector liber, determinat doar de moment. Momentul este perpendicular pe planul format de pereche.
O pereche poate fi înlocuită cu o forță paralelă de forță egală și o pereche cu un moment egal cu produsul acestei forțe și distanța până la noul punct de aplicare.
Teoreme de perechi .
1) Două perechi situate în același plan pot fi înlocuite cu o pereche situată în același plan, cu un moment egal cu suma momentelor acestor două perechi. ...
2) Două perechi cu momente egale din punct de vedere geometric sunt echivalente.
3) Fără a încălca starea unui corp rigid, o pereche de forțe poate fi transferată în planul de acțiune al acestuia. Acestea. momentul unei perechi de forțe este un vector liber.
4) Un sistem de mai multe perechi de forțe este echivalent cu o pereche, al cărei moment este egal cu suma vectorială a momentelor acestor perechi. Acestea. sistemul de perechi se reduce la o pereche, al cărei moment este egal cu suma momentelor tuturor perechilor. Condiție de echilibru pentru perechi de forțe: - suma geometrică a momentelor lor este 0. Perechile de forțe situate în același plan se echilibrează reciproc dacă suma algebrică a momentelor lor este åM i = 0.
Momentul forței relativ la un punct este un vector egal numeric cu produsul dintre modulul forței de către umăr și îndreptat perpendicular pe planul care conține forța și punctul, în așa direcție încât, privind spre el, se poate vedea forța tinde să se întoarcă împotriva cursul orelor. Umărul „h” - cea mai scurtă distanță de la un punct la linia de acțiune a forței. - momentul de forta este egal cu produsul vectorial al vectorului de vector. Modulul produsului vectorial: R × F × sina = F × h. Pentru sisteme plate. forțele găsesc de obicei nu vectorul momentului, ci doar modulul acestuia: ± F × h,> 0 - față de ora.str .; x, F y, F z sunt proiecțiile forței pe axele de coordonate și punctul 0 este originea, atunci
= (yF z - zF y) + (zF x - xF z) + (xF y - yF x), de unde proiecțiile momentului de forță pe axa de coordonate .: М 0 x () = yF z - zF y ; М 0 y () = zF x - xF z; М 0 z () = xF y - yF x.
Vectorul principal este suma vectorială a tuturor forțelor aplicate corpului. Momentul principal despre centru este suma vectorială a momentelor tuturor forțelor aplicate corpului în jurul aceluiași centru.
Teorema (lema) despre transferul de forță paralel: forta aplicata in orice punct este solida. corp, echivalent cu aceeași forță aplicată în orice alt punct al acestui corp și o pereche de forțe, al căror moment este egal cu momentul forței date relativ la noul punct de aplicare.
1. Sistem plat de forțe convergente
Sistemul forțelor convergente este în echilibru, când sumele algebrice ale proiecțiilor termenilor săi pe fiecare dintre cele două axe de coordonate sunt egale cu zero.
Proiecția forței axei.
Axă se numește linie dreaptă, căreia i se atribuie o anumită direcție. Proiecția unui vector pe o axă este scalară.
Proiecția unui vector este considerată pozitivă (+) dacă direcția de la început până la sfârșit coincide cu direcția pozitivă a axei. Proiecția unui vector este considerată negativă (-) dacă direcția de la începutul proiecției până la sfârșitul acesteia este opusă direcției pozitive a axei.
Dacă forța coincide cu direcția pozitivă a axei, dar unghiul este obtuz, atunci proiecția forței pe axă va fi negativă.
Deci, proiecția forței pe axa de coordonate este egală cu produsul dintre modulul forței de cosinusul sau sinusul unghiului dintre vectorul forță și direcția pozitivă a axei.
Forța situată pe planul xOy poate fi proiectată pe două axe de coordonate Ox și Oy:
; ; .Proiecția sumei vectoriale pe axă.
Suma geometrică, sau rezultanta, a acestor forțe
este determinată de latura de închidere a poligonului de putere:,Unde n - număr termeni de vectori.
Deci, proiecția sumei vectoriale sau a rezultantei pe orice axă este egală cu suma algebrică a proiecțiilor termenilor vectorilor de pe aceeași axă.
2. Câteva forțe
Suma proiecțiilor unei perechi de forțe pe axa x și pe axa y este zero, deci perechea de forțe nu are rezultantă. În ciuda acestui fapt, corpul este în echilibru sub influența unei perechi de forțe.
Se determină capacitatea unei perechi de forțe de a produce rotație moment de cuplu egal cu produsul forței cu cea mai scurtă distanță dintre liniile de acțiune ale forțelor. Notăm momentul perechii M, și cea mai scurtă distanță dintre forțe A, apoi valoarea absolută a momentului:
Cea mai scurtă distanță dintre liniile de acțiune ale forțelor se numește - pereche de umeri, deci putem spune asta momentul unei perechi de forțe în valoare absolută este egal cu produsul uneia dintre forțele pe umărul acesteia.
Momentul unei perechi de forțe poate fi afișat cu o săgeată arcuită care indică direcția de rotație.
Două perechi de forțe sunt considerate echivalenteîn cazul în care după înlocuirea unei perechi cu alta, starea mecanică a corpului nu se modifică, i.e. mișcarea corpului nu se modifică sau echilibrul acestuia nu este perturbat.
Efectul acțiunii unei perechi de forțe asupra unui corp rigid nu depinde de poziția acestuia în plan. Astfel, o pereche de forțe poate fi transferată în planul acțiunii sale în orice poziție.
O altă proprietate a unei perechi de forțe, care stă la baza adunării perechilor:
- fara a incalca starea corpului, poti schimba modulele de forte si umarul perechii dupa bunul plac, atata timp cat momentul perechii ramane neschimbat.
Prin definiție, perechile de forțe sunt echivalente, adică. efectuează aceeași acțiune dacă momentele lor sunt egale.
Dacă, prin modificarea valorilor forțelor și umărului noii perechi, păstrăm egalitatea momentelor lor M 1 = M 2 sau F 1 a = F 2 b, atunci starea corpului nu va fi perturbată printr-o astfel de înlocuire.
Similar cu forțele, pot fi adăugate perechi. O pereche care înlocuiește acțiunea acestor perechi se numește rezultând. Acțiunea unei perechi de forțe este complet determinată de momentul și direcția ei de rotație. Pe baza acesteia, adunarea perechilor se realizează prin însumarea algebrică a momentelor lor, adică. momentul perechii rezultate este egal cu suma algebrică a momentelor perechilor constitutive.
Momentul perechii rezultate este determinat de formula:
M = M1 + M2+. .. + M NS.=
M і ,Unde momentele perechilor, care se rotesc în sensul acelor de ceasornic, sunt luate pozitiv, iar în sens invers acelor de ceasornic - negative. Pe baza regulii de mai sus pentru adunarea perechilor, se stabilește condiția de echilibru pentru un sistem de perechi situate în același plan și anume: pentru echilibrul sistemului de perechi este necesar și suficient ca momentul perechii rezultate să fie egal cu zero sau ca suma algebrică a momentelor perechilor să fie egală cu zero:
Moment de forță în jurul unui punct și al unei axe.
Momentul forței relativ la un punct este determinat de produsul dintre modulul forței și lungimea perpendicularei căzute de la punct la linia de acțiune a forței.
La fixarea corpului în punctul O, forța
tinde să-l rotească în jurul acestui punct. Se numește punctul O, relativ la care se ia momentul centrul momentului, și lungimea perpendicularei a - umărul relativ la centrul momentului.Moment de putere
relativ la O este determinată de produsul forţei asupra umărului:.Momentul este considerat a fi pozitiv dacă forța tinde să rotească corpul în sensul acelor de ceasornic și negativ - în sens invers acelor de ceasornic. Există o diferență semnificativă între momentul unui cuplu și momentul forței. Valoarea numerică și direcția momentului unei perechi de forțe nu depind de poziția acestei perechi în plan. Valoarea și direcția (semnul) momentului de forță depind de poziția punctului față de care este determinat momentul.De aceea, pentru a determina momentul de forță în jurul axei, trebuie să proiectați forța pe un plan perpendicular pe axa și găsiți momentul de proiecție al forței în raport cu punctul de intersecție al axei cu acest plan.
3. Metoda kinetostaticelor
Să ne imaginăm un punct material de masă m, care se deplasează cu accelerația a sub acțiunea unui sistem de forțe active și reactive, a cărui rezultată este F.
Vom folosi una dintre formulele cunoscute nouă (ecuația de bază a dinamicii) pentru a scrie ecuațiile de mișcare sub formă de ecuații de echilibru (metoda kinetostatică):
Să rescriem această ecuație după cum urmează:
Expresia se notează cu K în și se numește forță de inerție:
Forța de inerție este un vector egal cu produsul dintre masa unui punct prin accelerația sa și îndreptat în direcția opusă accelerației.
Această egalitate, care este o expresie matematică a principiului, care poartă numele omului de știință francez D'Alembert (1717-1783), poate fi considerată drept ecuația de echilibru a unui punct material. Trebuie subliniat că egalitatea obținută, deși se numește ecuația de echilibru, este de fapt o ecuație de mișcare modificată a unui punct material.
Principiul d'Alembert este formulat astfel: forţele active şi reactive care acţionează asupra unui punct material, împreună cu forţele de inerţie, formează un sistem de forţe echilibrate reciproc care satisface toate condiţiile de echilibru.
Trebuie amintit că forța de inerție se aplică la punctul material luat în considerare în mod condiționat, dar pentru legătura care provoacă accelerație, este într-un anumit sens reală. Deținând proprietatea de inerție, orice corp se străduiește să-și mențină viteza în valoare absolută și direcția neschimbată, drept urmare va acționa asupra conexiunii provocând accelerație cu o forță egală cu forța de inerție. Ca exemplu de acțiune a forțelor de inerție, putem cita cazuri de distrugere a volantelor atunci când acestea ating o viteză unghiulară critică. În orice corp rotativ, forțele de inerție acționează, deoarece fiecare particulă a acestui corp are accelerație, iar particulele învecinate sunt legături pentru aceasta. Rețineți că greutatea unui corp este forța cu care corpul, datorită atracției Pământului, acționează asupra suportului (sau suspensiei), care îl împiedică să cadă liberă. Dacă corpul și suportul sunt nemișcate, atunci greutatea corpului este egală cu gravitația sa.
4. Momentul forței relativ la un punct
Luați în considerare o piuliță care este strânsă cu o cheie de o anumită lungime, aplicând forță musculară la capătul cheii. Dacă luați o cheie de câteva ori mai mult, apoi aplicând aceeași forță, piulița poate fi strânsă mult mai mult. De aici rezultă că aceeași forță poate avea o acțiune de rotație diferită. Acțiunea de rotație a unei forțe este caracterizată de un moment de forță.
Conceptul de moment al forței relativ la un punct a fost introdus în mecanică de către savantul și artistul italian al Renașterii Leonardo da Vinci (1452-1519).
Momentul de forță relativ la un punct este produsul modulului de forță pe umărul acestuia:
М 0 (¥) = РИ.
Punctul relativ la care este luat momentul se numește centrul momentului. Umărul forței în raport cu un punct este distanța cea mai scurtă de la centrul momentului până la linia de acțiune a forței.
Câteva forțe. Un moment de cuplu.
O pereche de forțe (sau pur și simplu o pereche) sunt două forțe de mărime egală, paralele și direcționate în direcții opuse (Fig. 22). Evident, și.

Fig. 22
În ciuda faptului că suma forțelor este zero, aceste forțe nu sunt echilibrate. Sub influența acestor forțe, o pereche de forțe, corpul va începe să se rotească. Și efectul de rotație va fi determinat de momentul perechii:
![]() .
.
Distanţă Aîntre liniile de acţiune ale forţelor se numeşte pereche de umeri.
Dacă perechea rotește corpul în sens invers acelor de ceasornic, momentul său este considerat pozitiv (ca în Fig. 22), dacă în sensul acelor de ceasornic - negativ.
Pentru ca momentul perechii să indice planul în care are loc rotația, acesta este reprezentat printr-un vector.
Vectorul momentului perechii este îndreptat perpendicular pe planul în care se află perechea, în așa direcție încât, dacă privim de acolo, vom vedea rotirea corpului în sens invers acelor de ceasornic (Fig. 23).
Este ușor de demonstrat că vectorul momentului perechii este vectorul acestui produs vectorial (Fig. 23). Și rețineți că este egal cu vectorul momentului de forță relativ la punct A, punctele de aplicare a celei de-a doua forțe:
Punctul de aplicare al vectorului va fi discutat mai jos. În timp ce o aplicăm la obiect A.

Fig. 23
Proprietăți de pereche
1) Proiecția unei perechi pe orice axă este zero. Aceasta rezultă din definiția unei perechi de forțe.
2) Aflați suma momentelor forțelor și alcătuind o pereche, relativ la orice punct O(fig. 24).

Fig. 24
Să arătăm vectorii de rază ai punctelor A 1 și A 2 și vectorul care leagă aceste puncte. Apoi momentul unei perechi de forțe relativ la punct O
Dar . De aceea .
Mijloace ![]() .
.
Momentul unei perechi de forțe relativ la orice punct este egal cu momentul acestei perechi.
De aici rezultă că, în primul rând, oriunde este ideea Oși, în al doilea rând, indiferent unde se află această pereche în corp și indiferent de modul în care este rotită în planul său, efectul ei asupra corpului va fi același. Întrucât momentul forțelor care formează o pereche, în aceste cazuri, este același, egal cu momentul acestei perechi.
Prin urmare, mai pot fi formulate două proprietăți.
3) Perechea poate fi mutată în interiorul corpului de-a lungul planului de acțiune și transferată în orice alt plan paralel.
4) Întrucât acţiunea asupra corpului forţelor care alcătuiesc perechea este determinată numai de momentul acesteia, produs al uneia dintre forţele de pe umăr, perechea poate modifica forţele şi umărul, dar astfel încât momentul de perechea rămâne aceeași. De exemplu, cu forțele F 1 = F 2 = 5 H și umăr A= 4 cm moment pereche m= 20 H × cm. Puteți face forțele egale cu 2 N, și umărul A= 10 cm.În acest caz, momentul va rămâne același 20 Ncm și efectul perechii asupra corpului nu se va schimba.
Toate aceste proprietăți pot fi combinate și, ca urmare, putem concluziona că perechile cu același vector de moment și indiferent de locul în care se află pe corp, au un efect egal asupra acestuia. Adică, astfel de perechi sunt echivalente.
Pe baza acesteia, pe diagramele de proiectare, perechea este reprezentată ca un arc cu o săgeată care indică direcția de rotație, iar valoarea momentului este scrisă lângă m... Sau, dacă este o construcție spațială, arătați doar vectorul momentului acestei perechi. Iar vectorul momentului perechii poate fi aplicat în orice punct al corpului. Aceasta înseamnă că vectorul momentului perechii este un vector liber.
Și încă o remarcă suplimentară. Deoarece momentul perechii este egal cu vectorul momentului uneia dintre forțele sale față de punctul de aplicare al celei de-a doua forțe, momentul perechii de forțe relativ la orice axă z- este proiecția vectorului moment al perechii pe această axă:
unde este unghiul dintre vector și axă z.
Este convenabil să folosiți conceptul de moment algebric al unei perechi dacă toate perechile se află în același plan. Acum imaginați-vă că este necesar să luați în considerare perechi ale căror planuri de acțiune, unul în raport cu celălalt, sunt situate în spațiu. În acest caz, se introduce conceptul de moment vectorial al unei perechi. Prin analogie cu momentul vector al forței relativ la centru, momentul vectorial al perechii ar trebui să determine:
planul de acțiune al acestei perechi;
sensul de rotație al perechii în acest plan;
valoarea numerică a momentului perechii.
Astfel, modulul acestui vector ar trebui să exprime, pe o scară aleasă în mod arbitrar, valoarea numerică a momentului perechii, iar direcția acestui vector să determine direcția perpendicularei pe plan.
acțiunile cuplului. Se obișnuiește să direcționeze momentul vectorial al unei perechi de-a lungul perpendicularei pe planul său în acea direcție, astfel încât, privind perechea de la capătul ei,
vezi această pereche rotind corpul în sens invers acelor de ceasornic (Fig. 25).
Pornind de la faptul că acţiunea perechii asupra corpului nu depinde de poziţia sa în planul său de acţiune, punctul de aplicare a momentului vectorial al perechii nu contează. În mod convențional, acest punct este considerat punctul de mijloc al segmentului care leagă punctele de aplicare a forțelor acestei perechi.
Adăugarea de perechi. Condiții de echilibru pentru perechi
Teorema adunării perechilor aflate în același plan. Un sistem de perechi situate în același plan este echivalent cu o pereche situată în același plan
plan şi având un moment egal cu suma algebrică a momentelor termenilor perechilor.
Dovada: Lăsați trei perechi să acționeze asupra corpului cu momente  ,
, ,
, (fig. 26, A). Pe baza teoremei echivalenței perechilor, putem înlocui aceste perechi cu trei perechi
(fig. 26, A). Pe baza teoremei echivalenței perechilor, putem înlocui aceste perechi cu trei perechi  ,
, ,
, având un umăr comun
având un umăr comun  si aceleasi momente:
si aceleasi momente:  ,
, ,
, (fig. 26, b). Adăugând separat forțele aplicate în puncte
(fig. 26, b). Adăugând separat forțele aplicate în puncte  și
și  , ajungem la punct
, ajungem la punct  forta
forta  , iar la punct
, iar la punct  forta
forta  , care va fi egal în modul (Fig. 26, v).
, care va fi egal în modul (Fig. 26, v).

Ca urmare, întregul sistem de perechi este înlocuit cu o pereche  cu o clipă. Pentru cazul de la "
cu o clipă. Pentru cazul de la "  »Cupluri cu momente
»Cupluri cu momente  ,
, ,
…
,
… , sistemul este înlocuit cu o pereche cu momentul
, sistemul este înlocuit cu o pereche cu momentul  ... Dacă perechile sunt situate în spațiu, atunci putem merge la egalitatea vectorială
... Dacă perechile sunt situate în spațiu, atunci putem merge la egalitatea vectorială  ... Proiectând această egalitate vectorială pe axa sistemului de coordonate carteziene, obținem
... Proiectând această egalitate vectorială pe axa sistemului de coordonate carteziene, obținem  ,
, ,
, .
.
Din aceasta obținem condiția de echilibru pentru sistemul de perechi: pentru echilibrul sistemului de perechi este necesar și suficient ca momentul perechii rezultate să fie egal cu zero
 .
.
Condiție de echilibru geometric
: pentru echilibrul unui sistem arbitrar de perechi, este necesar și suficient ca momentul vectorial al perechii rezultate să fie egal cu zero  .
.
Condiție de echilibru analitic
:
 sau prin proiecţia pe axă
sau prin proiecţia pe axă  ,
, ,
, .
(7)
.
(7)
Tema 5. Aducerea sistemului de forțe în centru
Lăsați sistemul să acționeze asupra corpului din  »Forțele aflate într-un singur plan.
»Forțele aflate într-un singur plan.
M  Știm cum să le adăugăm dacă se intersectează într-un punct sau sunt paralele. Cu toate acestea, dacă aceste forțe în plan sunt localizate în mod arbitrar, atunci devine necesar să aducem aceste forțe într-un fel de centru. Să arătăm această procedură pentru aducerea unei forțe într-un centru dat folosind o forță ca exemplu. Teorema. Orice forță dată este echivalentă cu aceeași mărime și direcție a forțelor, dar aplicată în alt punct al corpului și într-o pereche.
Știm cum să le adăugăm dacă se intersectează într-un punct sau sunt paralele. Cu toate acestea, dacă aceste forțe în plan sunt localizate în mod arbitrar, atunci devine necesar să aducem aceste forțe într-un fel de centru. Să arătăm această procedură pentru aducerea unei forțe într-un centru dat folosind o forță ca exemplu. Teorema. Orice forță dată este echivalentă cu aceeași mărime și direcție a forțelor, dar aplicată în alt punct al corpului și într-o pereche.
Dată putere  aplicat la un moment dat
aplicat la un moment dat  (fig. 27, A). Este necesar să se aducă această forță într-un centru ales în mod arbitrar
(fig. 27, A). Este necesar să se aducă această forță într-un centru ales în mod arbitrar  si pentru ca starea corpului sa nu se schimbe. Aplicam la punct
si pentru ca starea corpului sa nu se schimbe. Aplicam la punct  două forţe opuse
două forţe opuse  și
și  egal în modul forței
egal în modul forței  (fig. 27, b). Apoi forțe
(fig. 27, b). Apoi forțe  și
și  formează o pereche. Prin urmare, forța dată
formează o pereche. Prin urmare, forța dată  poate fi înlocuit cu o forță egală
poate fi înlocuit cu o forță egală  aplicat oriunde pe corp și o pereche
aplicat oriunde pe corp și o pereche  cu o clipă
cu o clipă  , care trebuia să dovedească (Fig. 27, v).
, care trebuia să dovedească (Fig. 27, v).
Din teorema demonstrată, obținem că această forță poate fi transferată paralel cu ea însăși în orice punct corp cu atașarea perechii corespunzătoare. Prin urmare un cuplu  sunt numite atașat
... Modulul momentului perechii conectate este
sunt numite atașat
... Modulul momentului perechii conectate este  ... Pe de altă parte, munca
... Pe de altă parte, munca  reprezintă un moment de forță
reprezintă un moment de forță  faţă de noul centru de referinţă
faţă de noul centru de referinţă  :
: .Prin urmare,
.Prin urmare,  , moment al perechii atașate
, moment al perechii atașate  egală cu momentul forței
egală cu momentul forței  atașat în centrul vechi
atașat în centrul vechi
 centru relativ nou
centru relativ nou
 .
.
Aducerea unui sistem plat de forțe într-un centru dat. Cazuri speciale de turnare
 Să acționeze asupra corpului un sistem arbitrar de forțe
Să acționeze asupra corpului un sistem arbitrar de forțe  ,
, ,
…,
,
…, situat în același plan (Fig. 28, A). Luați un punct arbitrar în acest plan
situat în același plan (Fig. 28, A). Luați un punct arbitrar în acest plan  , pe care o vom numi centru de referință, iar folosind teorema demonstrată mai sus, aducem toate forțele în centru
, pe care o vom numi centru de referință, iar folosind teorema demonstrată mai sus, aducem toate forțele în centru  (fig. 28, b).
(fig. 28, b).
Drept urmare, în centru  obținem un sistem de forțe convergente și un sistem de perechi de forțe cu momente:
obținem un sistem de forțe convergente și un sistem de perechi de forțe cu momente:  ,
, ,
…,
,
…, ... Sistemul de forțe convergente poate fi înlocuit cu o singură forță
... Sistemul de forțe convergente poate fi înlocuit cu o singură forță  atașat în centru
atașat în centru  , în care
, în care  ... În mod similar, prin teorema adunării perechilor, toate perechile pot fi înlocuite cu o pereche situată în același plan. Momentul acestei perechi este
... În mod similar, prin teorema adunării perechilor, toate perechile pot fi înlocuite cu o pereche situată în același plan. Momentul acestei perechi este  .
.
Cantitatea  , egală cu suma geometrică a tuturor forțelor sistemului, se numește vectorul principal al sistemului... Cantitatea
, egală cu suma geometrică a tuturor forțelor sistemului, se numește vectorul principal al sistemului... Cantitatea  sunt numite punctul principal al sistemului relativ la centru
sunt numite punctul principal al sistemului relativ la centru
 .
.
Ca rezultat, am constatat că atunci când reducem un sistem plat arbitrar de forțe la un anumit centru
 , obținem doi vectori:
, obținem doi vectori:  este vectorul principal al sistemului și
este vectorul principal al sistemului și  - momentul principal al sistemului relativ la centru
- momentul principal al sistemului relativ la centru
 .
.
Trebuie remarcat aici că vectorul principal al sistemului
 nu depinde de centrul de referință, deoarece toate forțele sunt transferate paralel cu ele însele și punctul principal al sistemului
nu depinde de centrul de referință, deoarece toate forțele sunt transferate paralel cu ele însele și punctul principal al sistemului
 depinde de centrul de aducție, deoarece atunci când centrul de aducție se schimbă, umerii forțelor se vor schimba.
depinde de centrul de aducție, deoarece atunci când centrul de aducție se schimbă, umerii forțelor se vor schimba.
Să luăm acum în considerare ce forme cele mai simple pot fi reduse la un sistem plat de forțe.

Să luăm în considerare două cazuri.
A)
 ,
,
 ... În acest caz, sistemul este înlocuit imediat rezultanta, care în acest caz va fi egal cu vectorul principal al sistemului și trece prin punct
... În acest caz, sistemul este înlocuit imediat rezultanta, care în acest caz va fi egal cu vectorul principal al sistemului și trece prin punct  .
.
b  )
)
 ,
,
 ... În acest caz, sistemul este și el înlocuit rezultanta, care va fi de asemenea egal cu vectorul principal al sistemului, dar nu va trece prin punct
... În acest caz, sistemul este și el înlocuit rezultanta, care va fi de asemenea egal cu vectorul principal al sistemului, dar nu va trece prin punct  , și prin punct
, și prin punct  ... Să arătăm că acesta este într-adevăr cazul și să determinăm poziția punctului
... Să arătăm că acesta este într-adevăr cazul și să determinăm poziția punctului  ... Fie ca rezultat al reducerii obținem vectorul principal
... Fie ca rezultat al reducerii obținem vectorul principal  și punctul principal
și punctul principal  relativ la centru
relativ la centru  (fig. 29, A). Să descriem câteva forțe prin forțe
(fig. 29, A). Să descriem câteva forțe prin forțe  și
și  , și selectăm aceste forțe în așa fel încât să avem egalitățile:
, și selectăm aceste forțe în așa fel încât să avem egalitățile:  ,
, (fig. 29, b). Apoi aruncăm forțele
(fig. 29, b). Apoi aruncăm forțele  și
și  echilibrat, obținem că sistemul este înlocuit cu rezultatul
echilibrat, obținem că sistemul este înlocuit cu rezultatul  dar trecând prin punct
dar trecând prin punct  (fig. 29, v). Poziția punctului
(fig. 29, v). Poziția punctului  va fi determinat de raport
va fi determinat de raport  .
.

Teorema lui Varignon asupra momentului rezultantei
Momentul sistemului rezultant de forțe relativ la orice punct din plan este egal cu suma algebrică a momentelor forțelor constitutive relativ la același punct.
Luați în considerare un sistem plat de forțe convergente în punctul respectiv  (fig. 30, A).
(fig. 30, A).


























Ab c
Inlocuim acest sistem de forte cu o rezultanta aplicata in acelasi punct (Fig. 30, b). Să determinăm momentul acestei rezultante relativ la punct  culcat pe ax
culcat pe ax  (fig. 30, v). Extindem rezultatul
(fig. 30, v). Extindem rezultatul  în componente
în componente  și
și  , fiecare dintre acestea va fi determinat de:,. Determinarea momentului acestor proiecții relativ la punct
, fiecare dintre acestea va fi determinat de:,. Determinarea momentului acestor proiecții relativ la punct  (fig. 30, v), înțelegem asta
(fig. 30, v), înțelegem asta  , deoarece
, deoarece  traversează punctul
traversează punctul  ... Atunci . Considerând fiecare dintre forțe într-un mod similar (Fig. 30, A), obținem că momentul fiecăruia dintre ele relativ la punct
... Atunci . Considerând fiecare dintre forțe într-un mod similar (Fig. 30, A), obținem că momentul fiecăruia dintre ele relativ la punct  va fi determinată de momentul proiecţiei acestor forţe pe axă
va fi determinată de momentul proiecţiei acestor forţe pe axă  relativ la punct
relativ la punct  , adică ,,. Ținând cont de asta, obținem
, adică ,,. Ținând cont de asta, obținem
 .
(8)
.
(8)