Primjena principa mogućih pokreta. Princip mogućih pokreta. Rad unutrašnjih snaga
Za rješavanje statičkih problema dinamičkim metodama formuliran je princip mogućih pomaka.
Definicije
Veze nazivaju se sva tijela koja ograničavaju kretanje dotičnog tijela.
Idealno nazivaju se veze, čiji je rad reakcija na bilo koji mogući pomak jednak nuli.
Broj stepeni slobode mehaničkog sistema je broj takvih međusobno nezavisnih parametara uz pomoć kojih se jednoznačno određuje položaj sistema.
Na primjer, lopta koja se nalazi na ravni ima pet stupnjeva slobode, a cilindrična šarka ima jedan stupanj slobode.
Općenito, mehanički sistem može imati beskonačan broj stupnjeva slobode.
Moguća kretanja nazvaćemo takva kretanja koja su, prvo, dozvoljena superponiranim vezama, i, drugo, beskonačno mala.
Pokretno-klizni mehanizam ima jedan stepen slobode. Sljedeći parametri se mogu prihvatiti kao moguća kretanja: , x i sl.
Za bilo koji sistem, broj mogućih pokreta neovisnih jedan od drugog jednak je broju stupnjeva slobode.
Neka je neki sistem u ravnoteži, a veze koje su nametnute ovom sistemu su idealne. Tada za svaku tačku sistema možemo napisati jednačinu
 ,
(102)
,
(102)
Gdje  - rezultanta aktivnih sila primijenjenih na materijalnu tačku;
- rezultanta aktivnih sila primijenjenih na materijalnu tačku;
 - rezultat reakcija veze.
- rezultat reakcija veze.
Pomnožite (102) skalarno sa vektorom mogućeg kretanja tačke 
 ,
,
pošto su veze idealne, uvek je tako  , ono što ostaje je zbir elementarnih radova aktivnih sila koje djeluju na tačku
, ono što ostaje je zbir elementarnih radova aktivnih sila koje djeluju na tačku
 .
(103)
.
(103)
Jednačina (103) se može napisati za sve materijalne tačke, zbrajanjem koje dobijamo
 .
(104)
.
(104)
Jednačina (104) izražava sljedeći princip mogućih kretanja.
Za ravnotežu sistema sa idealnim vezama potrebno je i dovoljno da zbir elementarnih radova svih aktivnih sila koje na njega djeluju za svako moguće kretanje sistema bude jednak nuli.
Broj jednačina (104) jednak je broju stepeni slobode datog sistema, što je prednost ove metode.
Opća jednadžba dinamike (D'Alembert-Lagrangeov princip)
Princip mogućih pomaka omogućava rješavanje statičkih problema pomoću dinamičkih metoda, s druge strane, d'Alembertov princip daje opći metod za rješavanje dinamičkih problema pomoću statičkih metoda. Kombinacijom ova dva principa možemo dobiti opšti metod za rešavanje problema u mehanici, koji se naziva D'Alembert-Lagrangeov princip.
 .
(105)
.
(105)
Kada se sistem kreće sa idealnim vezama u svakom trenutku vremena, zbir elementarnih radova svih primijenjenih aktivnih sila i svih inercijskih sila na bilo koje moguće kretanje sistema bit će jednak nuli.
U analitičkom obliku, jednačina (105) ima oblik
Lagrangeove jednadžbe druge vrste
Generalizirane koordinate (q) To su parametri koji su nezavisni jedan od drugog i koji na jedinstven način određuju ponašanje mehaničkog sistema.
Broj generaliziranih koordinata uvijek je jednak broju stupnjeva slobode mehaničkog sistema.
Svi parametri koji imaju bilo koju dimenziju mogu se odabrati kao generalizirane koordinate.
N  Na primjer, kada se proučava kretanje matematičkog klatna, koje ima jedan stepen slobode, kao generalizirana koordinata q mogu se prihvatiti parametri:
Na primjer, kada se proučava kretanje matematičkog klatna, koje ima jedan stepen slobode, kao generalizirana koordinata q mogu se prihvatiti parametri:
x(m), y(m) – koordinate tačke;
s(m) – dužina luka;
(m 2) – površina sektora;
(rad) – ugao rotacije.
Kako se sistem kreće, njegove generalizirane koordinate će se kontinuirano mijenjati tokom vremena
Jednačine (107) su jednačine kretanja sistema u generaliziranim koordinatama.
Derivati generaliziranih koordinata u odnosu na vrijeme se nazivaju generalizovane sistemske brzine
 .
(108)
.
(108)
Dimenzija generalizirane brzine ovisi o dimenziji generalizirane koordinate.
Bilo koje druge koordinate (kartezijanske, polarne, itd.) mogu se izraziti kroz generalizirane koordinate.
Uz koncept generalizovane koordinate uvodi se i pojam generalizovane sile.
Ispod generalizovana sila razumjeti količinu jednaku omjeru zbira elementarnih radova svih sila koje djeluju na sistem na određenom elementarnom prirastu generalizirane koordinate prema ovom prirastu
 ,
(109)
,
(109)
Gdje S– generalizovani koordinatni indeks.
Dimenzija generalizirane sile ovisi o dimenziji generalizirane koordinate.
Za pronalaženje jednadžbi gibanja (107) mehaničkog sistema s geometrijskim vezama u generaliziranim koordinatama koriste se diferencijalne jednadžbe u Lagrangeovom obliku druge vrste
 .
(110)
.
(110)
B (110) kinetička energija T sistem je izražen kroz generalizovane koordinate q S i generalizovane brzine  .
.
Lagrangeove jednadžbe pružaju jedinstven i prilično jednostavan metod za rješavanje problema dinamike. Vrsta i broj jednačina ne zavisi od broja tela (tačaka) uključenih u sistem, već samo od broja stepeni slobode. Sa idealnim vezama, ove jednačine omogućavaju eliminaciju svih prethodno nepoznatih reakcija veza.
Neophodno je i dovoljno da zbir rada, svih aktivnih sila primijenjenih na sistem za bilo koje moguće kretanje sistema, bude jednak nuli.
Broj jednačina koje se mogu sastaviti za jedan mehanički sistem, na osnovu principa mogućih pomaka, jednak je broju stepeni slobode samog mehaničkog sistema.
Književnost
- Targ S. M. Kratki kurs teorijske mehanike. Udžbenik za fakultete - 10. izd., revidirano. i dodatne - M.: Više. škola, 1986.- 416 str., ilustr.
- Osnovni kurs teorijske mehanike (prvi deo) N. N. Buchgolts, Izdavačka kuća Nauka, Glavna redakcija Fizičko-matematičke literature, Moskva, 1972, 468 str.
Wikimedia Foundation. 2010.
Pogledajte šta je “Princip mogućih pomaka” u drugim rječnicima:
princip mogućih kretanja
Jedan od varijacionih principa mehanike, uspostavljanje opšteg uslova za mehaničku ravnotežu. sistemima. Prema V. p.p., za mehaničku ravnotežu. sistema sa idealnim vezama (vidi MEHANIČKE VEZE) potrebno je i dovoljno da zbir rada dAi...... Fizička enciklopedija
Veliki enciklopedijski rječnik
PRINCIP MOGUĆIH KRETANJA, za ravnotežu mehaničkog sistema neophodno je i dovoljno da je zbir rada svih sila koje deluju na sistem za svako moguće kretanje sistema jednak nuli. Princip mogućih kretanja primjenjuje se kada... ... enciklopedijski rječnik
Jedan od varijacionih principa mehanike (vidi Varijacijski principi mehanike), koji uspostavlja opšti uslov za ravnotežu mehaničkog sistema. Prema V. p.p., za ravnotežu mehaničkog sistema sa idealnim vezama (vidi Veze ... ... Velika sovjetska enciklopedija
Princip virtuelne brzine, diferencijalni varijacioni princip klasične mehanike, izražava najopštije uslove ravnoteže mehaničkih sistema ograničenih idealnim vezama. Prema V. p. p. mehan. sistem je u ravnoteži... Mathematical Encyclopedia
Za ravnotežu mehaničkog sistema neophodno je i dovoljno da zbir rada svih sila koje deluju na sistem za svako moguće kretanje sistema bude jednak nuli. U proučavanju uslova ravnoteže primenjuje se princip mogućih pomaka. enciklopedijski rječnik
Za mehaničku ravnotežu. Za sistem je neophodno i dovoljno da zbir rada svih sila koje deluju na sistem za svako moguće kretanje sistema bude jednak nuli. V. p. p. se koristi u proučavanju uslova ravnoteže složenih mehaničkih sistema. sistemi...... Prirodna nauka. enciklopedijski rječnik
princip virtuelnih pomeranja- virtualiųjų poslinkių principas statusas T sritis fizika atitikmenys: engl. princip virtuelnog pomeranja vok. Prinzip der virtuellen Verschiebungen, n rus. princip virtuelnih pomaka, m; princip mogućih pokreta, m pranc. principe des … Fizikos terminų žodynas
Jedan od varijacionih principa mehanike, prema rum za datu klasu mehaničkih kretanja upoređujući jedno s drugim. sistema, valjan je onaj za koji fizički. veličina, tzv djelovanje, ima najmanju (tačnije, stacionarnu)… … Fizička enciklopedija
Knjige
- Teorijska mehanika. U 4 toma. Volume 3: Dynamics. Analitička mehanika. Tekstovi predavanja. Lešinar Ministarstva odbrane Ruske Federacije, Bogomaz Irina Vladimirovna. Udžbenik sadrži dva dijela jednog predmeta teorijske mehanike: dinamiku i analitičku mehaniku. U prvom dijelu se detaljno razmatraju prvi i drugi problemi dinamike, također...
Princip mogućih pokreta: za ravnotežu mehaničkog sistema sa idealnim vezama potrebno je i dovoljno da zbir elementarnih radova svih aktivnih sila koje na njega djeluju za bilo koji mogući pomak bude jednak nuli. ili u projekcijama: .
Princip mogućih pomaka daje u opštem obliku uslove ravnoteže za bilo koji mehanički sistem i daje opšti metod za rešavanje statičkih problema.
Ako sistem ima nekoliko stupnjeva slobode, onda se jednačina principa mogućih kretanja sastavlja za svako od nezavisnih kretanja posebno, tj. postojaće onoliko jednačina koliko sistem ima stepena slobode.
Princip mogućih pomaka je pogodan po tome što se pri razmatranju sistema sa idealnim vezama njihove reakcije ne uzimaju u obzir i potrebno je raditi samo sa aktivnim silama.
Princip mogućih pokreta je formuliran na sljedeći način:
Da bi mater. sistem koji je podložan idealnim vezama je u stanju mirovanja; potrebno je i dovoljno da je zbir elementarnog rada aktivnih sila na mogućim pomacima tačaka u sistemu pozitivan
Opća jednadžba dinamike- kada se sistem kreće sa idealnim vezama u bilo kom trenutku vremena, zbir elementarnih radova svih primenjenih aktivnih sila i svih inercijskih sila na bilo koje moguće kretanje sistema biće jednak nuli. Jednačina koristi princip mogućih pomaka i D'Alembertov princip i omogućava vam da sastavite diferencijalne jednadžbe kretanja bilo kojeg mehaničkog sistema. Daje opću metodu za rješavanje dinamičkih problema.
Slijed kompilacije:
a) na svako tijelo primjenjuju se navedene sile koje na njega djeluju, a uvjetno se primjenjuju i sile i momenti parova inercijskih sila;
b) informisati sistem o mogućim kretanjima;
c) sastaviti jednačine za princip mogućih kretanja, s obzirom da je sistem u ravnoteži.
Treba napomenuti da se opća jednadžba dinamike može primijeniti i na sisteme s neidealnim vezama, samo što se u tom slučaju reakcije neidealnih veza, kao što su sila trenja ili moment trenja kotrljanja, moraju klasificirati kao aktivne sile. .
Rad na mogućem pomaku i aktivnih i inercijskih sila traži se na isti način kao i elementarni rad na stvarnom pomaku:
Mogući rad sile: .
Mogući rad u trenutku (par sila): .
Generalizovane koordinate mehaničkog sistema su parametri q 1 , q 2 , ..., q S, nezavisni jedan od drugog, bilo koje dimenzije, koji jednoznačno određuju položaj sistema u bilo kom trenutku.
Broj generaliziranih koordinata je jednak S - broj stepeni slobode mehaničkog sistema. Položaj svake ν-te tačke sistema, odnosno njen radijus vektor, u opštem slučaju, uvek se može izraziti kao funkcija generalizovanih koordinata:
Opća jednadžba dinamike u generaliziranim koordinatama izgleda kao sistem S jednačina na sljedeći način:
……..………. ;
………..……. ;
ovdje je generalizirana sila koja odgovara generaliziranoj koordinati:
a je generalizovana inercijalna sila koja odgovara generalizovanoj koordinati:
Broj međusobno nezavisnih mogućih kretanja sistema naziva se brojem stepeni slobode ovog sistema. Na primjer. lopta na ravni može se kretati u bilo kojem smjeru, ali svako njeno moguće kretanje može se dobiti kao geometrijski zbir dvaju kretanja duž dvije međusobno okomite ose. Slobodno kruto tijelo ima 6 stupnjeva slobode.
Generalizovane sile. Za svaku generalizovanu koordinatu može se izračunati odgovarajuća generalizovana sila Q k.
Obračun se vrši prema ovom pravilu.
Odrediti generaliziranu silu Q k, što odgovara generaliziranoj koordinati q k, morate ovoj koordinati dati prirast (povećati koordinatu za ovaj iznos), ostavljajući sve ostale koordinate nepromijenjene, izračunati zbir rada svih sila primijenjenih na sistem na odgovarajuće pomake tačaka i podijeliti ga s prirastom od koordinata:
gdje je pomjeranje i-ta tačka sistema, dobijena promenom k-ta generalizovana koordinata.
Generalizirana sila se određuje pomoću elementarnog rada. Stoga se ova sila može izračunati drugačije:
A budući da postoji povećanje radijus vektora zbog povećanja koordinate s drugim konstantnim koordinatama i vremenom t, relacija se može definirati kao parcijalni izvod. Onda
gdje su koordinate tačaka funkcije generaliziranih koordinata (5).
Ako je sistem konzervativan, odnosno kretanje se dešava pod uticajem potencijalnih sila polja, čije su projekcije , gde su , a koordinate tačaka funkcije generalizovanih koordinata, tada
Generalizovana sila konzervativnog sistema je parcijalni izvod potencijalne energije duž odgovarajuće generalizovane koordinate sa predznakom minus.
Naravno, prilikom izračunavanja ove generalizovane sile, potencijalnu energiju treba odrediti kao funkciju generalizovanih koordinata
P = P( q 1 , q 2 , q 3 ,…,qs).
Bilješke.
Prvo. Prilikom izračunavanja generaliziranih sila reakcije, idealne veze se ne uzimaju u obzir.
Sekunda. Dimenzija generalizirane sile ovisi o dimenziji generalizirane koordinate.
Lagrangeove jednadžbe 2. vrste su izvedene iz opšte jednačine dinamike u generalizovanim koordinatama. Broj jednačina odgovara broju stupnjeva slobode:
Za sastavljanje Lagrangeove jednadžbe 2. vrste, biraju se generalizirane koordinate i pronalaze se generalizirane brzine . Pronađena je kinetička energija sistema, koja je funkcija generaliziranih brzina , i, u nekim slučajevima, generalizirane koordinate. Izvode se operacije diferencijacije kinetičke energije koje daju lijeve strane Lagrangeove jednadžbe.Rezultirajući izrazi se izjednačavaju sa generaliziranim silama, za pronalaženje kojih se, pored formula (26), često koriste sljedeće pri rješavanju zadataka:
U brojiocu na desnoj strani formule je zbir elementarnih radova svih aktivnih sila na mogućem pomaku sistema koji odgovara varijaciji i-te generalizovane koordinate - . Sa ovim mogućim kretanjem, sve ostale generalizirane koordinate se ne mijenjaju. Rezultirajuće jednačine su diferencijalne jednačine kretanja mehaničkog sistema sa S stepena slobode.
1. Generalizirane koordinate i broj stupnjeva slobode.
Kada se mehanički sistem kreće, sve njegove tačke ne mogu se kretati proizvoljno, jer su ograničene vezama. To znači da nisu sve koordinate tačaka nezavisne. Položaj tačaka se određuje navođenjem samo nezavisnih koordinata.
generalizovane koordinate. Za holonomske sisteme (tj. one čije su veze izražene jednačinama koje zavise samo od koordinata), broj nezavisnih generalizovanih koordinata mehaničkog sistema jednak broju stepeni slobode ovaj sistem.
primjeri:
Položaj svih tačaka je jedinstveno određen uglom rotacije
ručica.
Jedan stepen slobode.
2. Položaj slobodne tačke u prostoru određen je sa tri nezavisne jedna od druge koordinate. Zbog toga tri stepena slobode.
3. Kruto rotirajuće tijelo, položaj određen uglom rotacije j . Jedan stepen slobode.
4. Slobodno kruto tijelo čije je kretanje određeno sa šest jednačina - šest stepeni slobode.
2. Moguća kretanja mehaničkog sistema.
Idealne veze.
Moguće pomaci su imaginarna beskonačno mala kretanja dozvoljena u datom trenutku vezama nametnutim sistemu. Moguća kretanja tačaka mehaničkog sistema smatraju se veličinama prvog reda male veličine, pa se krivolinijska kretanja tačaka zamenjuju ravnim segmentima ucrtanim tangencijalno na trajektorije kretanja tačaka i označavaju se dS.

dS A = dj . O.A.
Sve sile koje djeluju na materijalnu tačku dijele se na specificirane i reakcione sile.
Ako je zbir rada obavljenog reakcijama veza na bilo koji mogući pomak sistema jednak nuli, tada se takve veze nazivaju idealan.
![]()
3. Princip mogućih pokreta.
Za ravnotežu mehaničkog sistema sa idealnim vezama potrebno je i dovoljno da zbir elementarnih radova svih aktivnih sila koje na njega deluju za svako moguće kretanje sistema bude jednak nuli.
![]()
Značenje princip mogućih pokreta:
1. U obzir se uzimaju samo aktivne snage.
2. Daje u opštem obliku uslov ravnoteže za bilo koji mehanički sistem, dok je u statici potrebno posmatrati ravnotežu svakog tela sistema posebno.
Zadatak.

Za dati položaj kliznog mehanizma u ravnoteži, pronaći odnos između momenta i sile ako OA = ℓ.
![]()
![]()
Opća jednadžba dinamike.
Princip mogućih pomaka daje opći metod za rješavanje statičkih problema. S druge strane, d'Alembertov princip dozvoljava korištenje statičkih metoda za rješavanje dinamičkih problema. Stoga se istovremenom primjenom ova dva principa može dobiti opći metod rješavanja dinamičkih problema.
Razmotrimo mehanički sistem na koji su nametnuta idealna ograničenja. Ako se odgovarajuće sile inercije dodaju svim tačkama sistema, osim aktivnih sila i reakcija spajanja koje djeluju na njih, tada će prema d'Alembertovom principu rezultirajući sistem sila biti u ravnoteži. Primjenom principa mogućih kretanja dobijamo:
Pošto su veze idealne, onda:
![]()
![]()
Ova jednakost predstavlja opšta jednačina dinamike.
Iz toga proizilazi d'Alembert-Lagrangeov princip– kada se sistem kreće sa idealnim vezama u svakom trenutku vremena, zbir elementarnih radova svih primenjenih aktivnih sila i svih inercijskih sila pri bilo kom mogućem kretanju sistema biće jednak nuli.
Zadatak.

U liftu do zupčanika 2 težina 2G sa radijusom R 2 =R primijenjen obrtni moment M=4GR.
Odredite ubrzanje podignutog tereta A težina G, zanemarujući težinu užeta i trenje u osovinama. Bubanj na koji je namotano uže i zupčanik koji je čvrsto pričvršćen za njega 1 , imaju ukupnu težinu 4G i radijus rotacije r = R. Radijus bubnja R A = R i zupčanici 1
R 1 =0,5R.
Opišimo sve djelujuće sile, smjer ubrzanja i moguće pomake.

________________
![]()


Zamijenimo u opštu jednačinu dinamike
Izrazimo pomak kroz ugao rotacije δφ 1
![]()
Zamenimo vrednosti
δφ 1 ≠0
Izrazimo sva ubrzanja kroz traženo aa i izjednačiti izraz u zagradama sa nulom

![]()
Zamenimo vrednosti



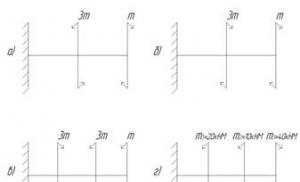
Princip mogućih pokreta.
 a = 0,15 m
a = 0,15 m
b = 2a = 0,3 m
m = 1,2 Nm __________________
x B; na B; N / A ; M str
Rješenje: Nađimo reakciju pokretnog oslonca A zašto mentalno odbacimo ovu vezu, zamjenjujući njeno djelovanje reakcijom N / A

Moguće pomicanje štapa AC je njegova rotacija oko šarke WITH pod uglom dj. Kernel Ned ostaje nepomičan.
Napravimo jednačinu rada, uzimajući u obzir da je rad sila pri okretanju tijela jednak proizvodu momenta sile u odnosu na centar rotacije i kuta rotacije tijela.
Odrediti reakcije krutog pričvršćivanja u podupiraču IN prvo pronađite trenutak reakcije Gospodin. Da bismo to učinili, odbacimo vezu koja sprječava rotaciju šipke Ned, zamjenjujući kruto pričvršćivanje sa zglobno-fiksiranim osloncem i primjenom momenta Gospodin .

Recimo štapu moguću rotaciju za ugao DJ 1.
Kreirajmo jednačinu rada za štap Ned:
Definirajmo pomake:
![]()

Da bismo odredili vertikalnu komponentu reakcije krutog pričvršćivanja, odbacujemo vezu koja sprječava vertikalno pomicanje točke IN, zamjenom krutog pričvršćivanja kliznim (rotacija je nemoguća) i primjenom reakcije:

Recimo lijevoj strani (štap) Ned sa klizačem IN) moguća brzina V B kretanje naprijed prema dolje. Kernel ACće se rotirati oko tačke A .
Napravimo radnu jednačinu:
![]()


Da bismo odredili horizontalnu komponentu reakcije krutog pričvršćivanja, odbacujemo vezu koja sprječava horizontalno pomicanje točke IN zamjena krute brtve kliznom i primjena reakcije:
Recimo lijevoj strani (klizač) IN zajedno sa štapom Ned) moguća brzina V B kretanje naprijed ulijevo. Od podrške A na valjcima, tada će se desna strana kretati naprijed istom brzinom. Stoga .
Napravimo radnu jednačinu za cijelu strukturu.
Da bismo provjerili ispravnost rješenja, sastavljamo jednadžbe ravnoteže za cijeli sistem:
Uslov je ispunjen.
odgovor: y B = -14,2 H; X B = -28,4 H; N A = 14,2 H; V P =3,33 Nm.
Generalizirane brzine. Generalizovane sile.
Nezavisne veličine koje jednoznačno određuju položaj svih tačaka mehaničkog sistema nazivaju se generalizovane koordinate. – q
Ako sistem ima S stepena slobode, tada će se odrediti njegov položaj S generalizirane koordinate:
q 1 ; q 2 ; ...; qs.
Pošto su generalizovane koordinate nezavisne jedna od druge, elementarni priraštaji ovih koordinata će takođe biti nezavisni:
dq 1 ; dq 2 ; ...; dq S .
Štaviše, svaka od količina dq 1 ; dq 2 ; ...; dq S određuje odgovarajuće moguće kretanje sistema, nezavisno od drugih.
Kako se sistem kreće, njegove generalizirane koordinate će se kontinuirano mijenjati tokom vremena; zakon ovog kretanja određen je jednadžbama:
, …. ,
Ovo su jednačine kretanja sistema u generalizovanim koordinatama.
Derivati generalizovanih koordinata u odnosu na vreme nazivaju se generalizovane brzine sistema:
Veličina zavisi od veličine q.
Razmotrimo mehanički sistem koji se sastoji od n materijalnih tačaka na koje djeluju sile F 1 , F 2 , F n. Neka sistem ima S stepena slobode i njegov položaj je određen generalizovanim koordinatama q 1 ; q 2 ; q 3. Informirajmo sistem o mogućem kretanju na kojem je koordinata q 1 dobija povećanje dq 1, a preostale koordinate se ne mijenjaju. Tada vektor radijusa tačke dobija elementarni prirast (dr k) 1. Ovo je prirast koji radijus vektor prima kada se promijeni samo koordinata q 1 po iznosu dq 1. Preostale koordinate ostaju nepromijenjene. Zbog toga (dr k) 1 izračunati kao parcijalni diferencijal:

Izračunajmo elementarni rad svih primijenjenih sila:

Stavimo to van zagrada dq 1, dobijamo:

Gdje - generalizovana moć.
dakle, generalizovana sila – ovo je koeficijent za prirast generalizovane koordinate.
Proračun generaliziranih sila svodi se na proračun mogućeg elementarnog rada.
Ako se svi promene q, To:
Prema principu mogućih pomaka, da bi sistem bio u ravnoteži potrebno je i dovoljno da SdA a k = 0. U generaliziranim koordinatama P 1. dq 1 + Q 2 . dq 2 + … + Q s . dq s = 0 dakle, Za ravnoteža sistema neophodno je i dovoljno da generalizovane sile koje odgovaraju mogućim pomacima odabranim za sistem, a samim tim i generalizovane koordinate, bile jednake nuli.
Q 1 = 0; Q2 = 0; … Q s = 0.
Lagrangeove jednadžbe.
Koristeći opštu dinamičku jednačinu za mehanički sistem, mogu se naći jednačine kretanja mehaničkog sistema.
4) odrediti kinetičku energiju sistema, izraziti ovu energiju kroz generalizovane brzine i generalizovane koordinate;
5) naći odgovarajuće parcijalne izvode od T pomoću i i zamijenite sve vrijednosti u jednadžbu.
Teorija uticaja.
Kretanje tijela pod djelovanjem običnih sila karakterizira kontinuirana promjena modula i smjerova brzina ovog tijela. Međutim, postoje slučajevi kada se brzine tačaka tijela, a samim tim i impuls krutog tijela, podvrgavaju konačnim promjenama u vrlo kratkom vremenskom periodu.
fenomen, u kojem se, u zanemarljivo malom vremenskom periodu, brzine tačaka na tijelu mijenjaju za konačan iznos naziva se udarac.
snaga, pod čijim djelovanjem nastaje udar, nazivaju se bubnjevi.
Kratak vremenski period t, tokom kojeg dolazi do udara se zove vreme udara.
Budući da su udarne sile veoma velike i da se tokom udara menjaju u značajnim granicama, u teoriji udara ne same udarne sile, već njihovi impulsi se smatraju merom interakcije tela.
Impulsi neudarnih sila tokom vremena t bit će vrlo male vrijednosti i mogu se zanemariti.
Teorema o promjeni impulsa tačke pri udaru:
Gdje v– brzina tačke na početku udara,
u– brzina tačke na kraju udara.
Osnovna jednadžba teorije udara.

Pomicanje tačaka u vrlo kratkom vremenskom periodu, odnosno za vrijeme udara, također će biti malo, pa ćemo stoga tijelo smatrati nepokretnim.
Dakle, možemo izvući sljedeće zaključke o djelovanju udarnih sila:
1) djelovanje neudarnih sila pri udaru može se zanemariti;
2) pomeranja tačaka tela pri udaru se mogu zanemariti i telo se može smatrati nepokretnim tokom udara;
princip virtuelne brzine - diferencijal varijacioni princip klasične mehanike, izražavajući najopštije uslove ravnoteže mehaničkih sistema ograničenih idealnim vezama.
Prema V. p. p. mehan. sistem je u ravnoteži u određenom položaju ako i samo ako je zbir elementarnih radova datih aktivnih sila na bilo koji mogući pomak koji izvlači sistem iz razmatranog položaja nula ili manji od nule:
u bilo kom trenutku.
Moguća (virtuelna) kretanja sistema se nazivaju. elementarna (beskonačno mala) kretanja tačaka sistema, dozvoljena u datom trenutku vezama nametnutim sistemu. Ako se veze drže (dvosmjerne), tada su moguća kretanja reverzibilna, a u stanju (*) treba uzeti znak jednakosti; ako su veze nezadržive (jednostrane), onda među mogućim pokretima postoje i nepovratni. Kada se sistem kreće pod uticajem aktivnih sila, veze deluju na tačke sistema sa određenim reakcionim silama (pasivnim silama), pri čijoj definiciji se pretpostavlja da su mehaničke sile u potpunosti uzete u obzir. efekat veza na sistem (u smislu da veze mogu biti zamenjene reakcijama koje one izazivaju) (aksiom oslobođenja). Pozvane veze idealno ako je zbir elementarnih djela njihovih reakcija, sa predznakom jednakosti za reverzibilna moguća kretanja, i predznacima jednakosti ili većim od nule za nepovratna kretanja. Ravnotežni položaji sistema su takvi položaji ![]() u kojoj će sistem ostati cijelo vrijeme ako se postavi u ove položaje sa nultim početnim brzinama, dok se pretpostavlja da su jednačine ograničenja zadovoljene za bilo koje vrijednosti t. Aktivne sile u opštem slučaju pretpostavlja se da su zadate funkcije i u uslov (*) treba uzeti u obzir
u kojoj će sistem ostati cijelo vrijeme ako se postavi u ove položaje sa nultim početnim brzinama, dok se pretpostavlja da su jednačine ograničenja zadovoljene za bilo koje vrijednosti t. Aktivne sile u opštem slučaju pretpostavlja se da su zadate funkcije i u uslov (*) treba uzeti u obzir
Uslov (*) sadrži sve jednačine i zakone ravnoteže sistema sa idealnim vezama, zbog čega možemo reći da je sva statika svedena na jednu opštu formulu (*).
Zakon ravnoteže, koji je izrazio V.p.p., prvi je uspostavio Guido Ubaldi na poluzi i na pokretnim blokovima ili remenicama. G. Galilei ga je ustanovio za nagnute ravni i smatrao ovaj zakon opštim svojstvom ravnoteže jednostavnih mašina. J. Wallis ju je stavio u osnovu statike i iz nje izveo teoriju ravnoteže mašina. R. Descartes je sveo svu statiku na jedan princip, koji se u suštini poklapa sa Galilejevim principom. J. Bernoulli je prvi shvatio veliku općenitost V. p. p.-a i njegovu korisnost u rješavanju problema statike. J. Lagrange je izrazio V. p. p. u opštem obliku i time sveo svu statiku na jednu opštu formulu; dao je dokaz (ne u potpunosti rigorozan) V. p. p. za sisteme ograničene dvosmjernim (ograničavajućim) vezama. Opću formulu statike za ravnotežu bilo kojeg sistema sila i metodu primjene ove formule koju je razvio J. Lagrange sustavno je koristio za izvođenje općih svojstava ravnoteže sistema tijela i za rješavanje različitih problema statike. , uključujući probleme ravnoteže nestišljivih, kao i kompresibilnih i elastičnih fluida. J. Lagrange je V. p. p. smatrao osnovnim principom za svu mehaniku. Rigorozan dokaz V. p.p., kao i njegovo proširenje na jednosmjerne (nesadržave) veze dali su J. Fourier i M. V. Ostrogradsky.
Lit.: Lagrange J., Mecanique analytiquc, P., 1788 (ruski prevod: Lagrange J., Analitička mehanika, M.-L., 1950); Fourier J., "J. de 1" Ecole Polytechnique", 1798, t. II, str. 20; Ostrogradsky M. V., Predavanja o analitičkoj mehanici, Sabrana djela, tom 1 ,
Dio 2, M.-L., 1946.
- - princip virtuelne brzine, - diferencijalni varijacioni princip klasične mehanike, koji izražava najopštije uslove ravnoteže mehaničkih sistema ograničenih idealnim vezama...
Mathematical Encyclopedia
- - Ideja da sadašnjost može imati ne jedan, već nekoliko pravaca razvoja u budućnosti verovatno je oduvek bila u kulturi...
Enciklopedija kulturoloških studija
- - skup mjera za procjenu stanja rezervoara, produktovoda, zapornih ventila i uređaja, komponenti i sklopova u opasnoj proizvodnji, sredstava za skladištenje i transport opasnih materija,...
Civilna zaštita. Pojmovni i terminološki rječnik
- - grafička konstrukcija kretanja čvorova štapnog sistema prema datim uzdužnim deformacijama njegovih štapova - dijagram na lokaciji - translokační obrazec - Verschiebungsplan - elmozdulásábra - šilzhiltiyn dijagrami - wykres przesunięć -...
Građevinski rječnik
- - metoda mehanike konstrukcija za određivanje sila i pomaka u statički neodređenim strukturnim sistemima, u kojoj se kao glavne nepoznanice biraju linearni i ugaoni pomaci - metoda...
Građevinski rječnik
- - predviđanje veličine i strukture sanitarnih gubitaka u mogućim vanrednim situacijama, omogućavanje utvrđivanja obima posla koji treba obaviti na pružanju medicinske pomoći, evakuaciji povrijeđenih,...
Rečnik termina za hitne slučajeve
- - - metoda logičke analize modalnih i intenzivnih koncepata, čija je osnova razmatranje zamislivih stanja stvari...
Philosophical Encyclopedia
- - SEMANTIKA MOGUĆIH SVJETOVA - skup semantičkih konstrukcija za interpretaciju neklasičnih logičkih veziva zasnovanu na istini, čija je glavna karakteristika uvođenje u razmatranje takvih...
Enciklopedija epistemologije i filozofije nauke
- - senzor koji pretvara mehanička kretanja u promjene sile ili napona električne struje, dizajniran za snimanje fizioloških procesa...
Veliki medicinski rječnik
- - Maxwellova teorema - je da je za linearno deformabilno tijelo sigma pomak tačke primjene jedinične sile Pk prvog stanja u smjeru njenog djelovanja uzrokovan bilo kojom drugom jediničnom silom...
- - Villotov dijagram, - geometrijski. konstrukcija koja određuje kretanje svih čvorova ravne rešetke na osnovu poznatih promjena u dužini njegovih šipki. Vidi sl. Do čl. Dijagram pomaka: a - dijagram farme...
Veliki enciklopedijski politehnički rječnik
- - Maxwellova teorema je da je za linearno deformabilno tijelo pomak δki tačke primjene jedinične sile Pk prvog stanja u smjeru njenog djelovanja uzrokovan bilo kojom drugom jediničnom silom Pi...
- - jedan od varijacionih principa mehanike, koji uspostavlja opšti uslov za ravnotežu mehaničkog sistema...
Velika sovjetska enciklopedija
- - Princip MOGUĆIH KRETANJA - za ravnotežu mehaničkog sistema neophodno je i dovoljno da zbir rada svih sila koje deluju na sistem za svako moguće kretanje sistema bude jednak nuli. Moguće...
Veliki enciklopedijski rečnik
- - pril., broj sinonima: 1 nema...
Rečnik sinonima
- - prid., broj sinonima: 2 ljubomoran revnostan...
Rečnik sinonima
"MOGUĆI PRINCIP KRETANJA" u knjigama
Tipologija društvenih pokreta
Iz knjige Socijalna filozofija autor Krapivensky Solomon EliazarovichTipologija društvenih pokreta Pre svega, P. Sorokin je identifikovao dva glavna tipa društvene mobilnosti – horizontalnu i vertikalnu. Primjeri horizontalne mobilnosti uključuju kretanje pojedinca od baptiste do metodističke religije
12. (NP5) Peti princip NP je princip poboljšanja ili princip univerzuma
Iz knjige Putovanje u sebe (0.73) autor Artamonov Denis12. (NP5) Peti princip NP je princip poboljšanja ili princip univerzuma.Peti princip je logičan nastavak – dodatak četvrtog principa. Uz njegovu pomoć, želio bih povući određenu paralelu između svrhe, značenja samog Univerzuma i naših aktivnosti
Tehnika pokreta
Iz knjige Mala knjiga kapuere autor Capoeira NestorTehnika pokreta Sada, ostavljajući za sobom čistu teoriju, došli smo do tačke u kojoj početnik počinje da se uči stvarnom jogou, igri capoeire. Metodologija navedena u nastavku donekle se razlikuje od one korištene u proteklih pedeset godina (od Bimba
Princip mogućih pokreta
Iz knjige Velika sovjetska enciklopedija (VO) autora TSBPrincip reciprociteta pokreta
Iz knjige Velika sovjetska enciklopedija (VZ) autora TSBKako osigurati anonimnost kretanja na internetu kada se borite protiv crnog PR-a
Iz knjige Suprotstavljanje crnom PR-u na Internetu autor Kuzin Aleksandar VladimirovičKako osigurati anonimnost kretanja na internetu kada se borite protiv crnog PR-a Budući da neprijatelj koji vas je napao na internetu može predstavljati prijetnju vašem životu i zdravlju, smatramo da je potrebno detaljnije se zadržati na pitanjima osiguranja
Iz knjige AutoCAD 2009 za studente. Priručnik za samouvođenje autor Sokolova Tatyana YurievnaAnimacija pokreta prilikom hodanja i letenja
Iz knjige AutoCAD 2008 za studente: popularan tutorijal autor Sokolova Tatyana YurievnaAnimacije hodanja i letenja Animacije pokreta pružaju pregled svakog pokreta, uključujući hodanje i letenje oko crteža. Prije nego što kreirate animaciju putanje, morate kreirati pregled. Tim
Animacija pokreta prilikom hodanja i letenja
Iz knjige AutoCAD 2009. Kurs obuke autor Sokolova Tatyana YurievnaAnimacije hodanja i letenja Animacije pokreta pružaju pregled svakog pokreta, uključujući hodanje i letenje oko crteža. Prije nego što kreirate animaciju putanje, morate kreirati pregled. Tim
Animacija pokreta prilikom hodanja i letenja
Iz knjige AutoCAD 2009. Počnimo! autor Sokolova Tatyana YurievnaAnimacije hodanja i letenja Animacije pokreta pružaju pregled svakog pokreta, uključujući hodanje i letenje oko crteža. Prije nego što kreirate animaciju putanje, morate kreirati pregled. Tim
GOLUBNJAK: Dijalektika kao odraz sezonskih kretanja
Iz knjige Computerra Magazin br.20 od 29.05.2007 autor Computerra magazineGOLUBNJAK: Dijalektika kao odraz sezonskih kretanja Autor: Sergej Golubicki „Skoro ništa nisam razumeo. I što je najvažnije, nisam razumeo kakve veze kompjuteri imaju s tim. Mislim da da nije postojao ovaj članak, svijet ne bi mnogo izgubio.” Korisnik "Ramses" na forumu Computerra upućen
“Od mogućih prijatelja, od mogućih uvreda...”
Iz knjige Nevidljiva ptica autor Chervinskaya Lidiya Davydovna“Od mogućih prijatelja, od mogućih uvreda...” Od mogućih prijatelja, od mogućih uvreda, Od mogućeg, na kraju krajeva, polupriznanja, Od moguće sreće, tako me srce boli... - Zbogom. Prošli smo most igračke preko rijeke, a odakle, odakle u ovom gradu?
10.6 Planiranje putovanja
Iz knjige Upravljanje ljudskim resursima: Vodič za učenje autor10.6 Planiranje kretanja Zadovoljavanje brojnih potreba i ispunjenje očekivanja direktno je povezano sa sadržajem posla, budući da posao zauzima najvažnije mjesto u čovjekovom životu, a čovjeku nije stalo do čega posvećuje najveći dio svog života.
Planiranje putovanja
Iz knjige Upravljanje ljudskim resursima za menadžere: Vodič za učenje autor Spivak Vladimir AleksandrovičPlaniranje putovanja Zadovoljavanje mnogih potreba i ispunjenje očekivanja direktno je povezano sa sadržajem posla, jer čovjeku nije stalo do čega posvećuje najveći dio svog života. Zadovoljavanje potreba često uključuje nešto učiniti
Princip 4: Lijekove treba uzimati samo ako je rizik od njihovog neuzimanja veći od rizika od mogućih nuspojava.
Iz knjige 10 koraka ka upravljanju svojim emotivnim životom. Prevazilaženje anksioznosti, straha i depresije kroz lično isceljenje od Wood Eva A.Princip 4: Lijekove treba uzimati samo ako je rizik od njihovog neuzimanja veći od rizika od mogućih nuspojava.Drugim riječima, potrebno je odmjeriti rizik u odnosu na korist. Svaki lijek može biti koristan ne samo za vas i