Penerapan prinsip kemungkinan gerakan. Prinsip kemungkinan gerakan. Pekerjaan kekuatan internal
Prinsip perpindahan yang mungkin terjadi dirumuskan untuk menyelesaikan masalah statis dengan menggunakan metode dinamis.
Definisi
Koneksi semua benda yang membatasi gerak benda tersebut disebut.
Ideal disebut koneksi, yang kerja reaksinya pada setiap perpindahan yang mungkin sama dengan nol.
Jumlah derajat kebebasan sistem mekanis adalah jumlah parameter yang saling independen yang dengannya posisi sistem ditentukan secara unik.
Misalnya, sebuah bola yang terletak pada suatu bidang mempunyai lima derajat kebebasan, dan engsel silinder mempunyai satu derajat kebebasan.
Secara umum, suatu sistem mekanis dapat memiliki derajat kebebasan yang tak terbatas.
Kemungkinan gerakan kita akan menyebut gerakan-gerakan yang, pertama, diperbolehkan oleh koneksi yang ditumpangkan, dan, kedua, sangat kecil.
Mekanisme penggeser engkol mempunyai satu derajat kebebasan. Parameter berikut dapat diterima sebagai kemungkinan pergerakan: , X dan sebagainya.
Untuk sistem apa pun, jumlah kemungkinan pergerakan yang independen satu sama lain sama dengan jumlah derajat kebebasan.
Biarkan suatu sistem berada dalam keseimbangan dan hubungan yang dikenakan pada sistem ini menjadi ideal. Kemudian untuk setiap titik sistem kita dapat menulis persamaannya
 ,
(102)
,
(102)
Di mana  - resultan gaya aktif yang diterapkan pada suatu titik material;
- resultan gaya aktif yang diterapkan pada suatu titik material;
 - resultan reaksi ikatan.
- resultan reaksi ikatan.
Kalikan (102) secara skalar dengan vektor kemungkinan pergerakan titik tersebut 
 ,
,
karena koneksinya ideal, selalu demikian  , yang tersisa adalah jumlah kerja dasar gaya-gaya aktif yang bekerja pada titik tersebut
, yang tersisa adalah jumlah kerja dasar gaya-gaya aktif yang bekerja pada titik tersebut
 .
(103)
.
(103)
Persamaan (103) dapat ditulis untuk semua poin material, penjumlahan yang kita peroleh
 .
(104)
.
(104)
Persamaan (104) mengungkapkan prinsip pergerakan yang mungkin terjadi berikut ini.
Untuk kesetimbangan suatu sistem dengan ikatan ideal, jumlah kerja dasar semua gaya aktif yang bekerja padanya untuk setiap kemungkinan pergerakan sistem harus sama dengan nol.
Banyaknya persamaan (104) sama dengan jumlah derajat kebebasan suatu sistem, yang merupakan keunggulan metode ini.
Persamaan umum dinamika (prinsip D'Alembert-Lagrange)
Prinsip perpindahan yang mungkin memungkinkan penyelesaian masalah statis dengan menggunakan metode dinamis; sebaliknya, prinsip d'Alembert memberikan metode umum untuk menyelesaikan masalah dinamis dengan menggunakan metode statis. Dengan menggabungkan kedua prinsip tersebut, kita dapat memperoleh metode umum penyelesaian masalah mekanika, yang disebut prinsip D'Alembert-Lagrange.
 .
(105)
.
(105)
Ketika suatu sistem bergerak dengan koneksi ideal pada setiap momen waktu, jumlah kerja dasar semua gaya aktif yang diterapkan dan semua gaya inersia pada setiap kemungkinan pergerakan sistem akan sama dengan nol.
Dalam bentuk analitis, persamaan (105) berbentuk
Persamaan Lagrange jenis kedua
Koordinat umum (Q) Ini adalah parameter yang independen satu sama lain dan secara unik menentukan perilaku sistem mekanis.
Jumlah koordinat umum selalu sama dengan jumlah derajat kebebasan sistem mekanik.
Parameter apa pun yang memiliki dimensi apa pun dapat dipilih sebagai koordinat umum.
N  Misalnya ketika mempelajari gerak bandul matematis yang mempunyai satu derajat kebebasan, sebagai koordinat umum Q parameter dapat diterima:
Misalnya ketika mempelajari gerak bandul matematis yang mempunyai satu derajat kebebasan, sebagai koordinat umum Q parameter dapat diterima:
X(M), kamu(m) – koordinat titik;
S(m) – panjang busur;
(m 2) – luas sektor;
(rad) – sudut rotasi.
Saat sistem bergerak, koordinat umumnya akan terus berubah seiring waktu
Persamaan (107) adalah persamaan gerak sistem dalam koordinat umum.
Turunan koordinat umum terhadap waktu disebut kecepatan sistem umum
 .
(108)
.
(108)
Dimensi kecepatan umum bergantung pada dimensi koordinat umum.
Koordinat lainnya (Kartesius, kutub, dll.) dapat dinyatakan melalui koordinat umum.
Seiring dengan konsep koordinat umum, diperkenalkan pula konsep gaya umum.
Di bawah kekuatan umum memahami besaran yang sama dengan perbandingan jumlah kerja dasar semua gaya yang bekerja pada sistem pada kenaikan dasar tertentu dari koordinat umum terhadap kenaikan ini
 ,
(109)
,
(109)
Di mana S– indeks koordinat umum.
Dimensi gaya umum bergantung pada dimensi koordinat umum.
Untuk mencari persamaan gerak (107) suatu sistem mekanik dengan hubungan geometri pada koordinat umum digunakan persamaan diferensial bentuk Lagrange jenis kedua.
 .
(110)
.
(110)
B (110) energi kinetik T sistem dinyatakan melalui koordinat umum Q S dan kecepatan umum  .
.
Persamaan Lagrange memberikan metode terpadu dan cukup sederhana untuk memecahkan masalah dinamika. Jenis dan jumlah persamaan tidak bergantung pada jumlah benda (titik) yang termasuk dalam sistem, tetapi hanya bergantung pada jumlah derajat kebebasan. Dengan ikatan ideal, persamaan ini memungkinkan untuk menghilangkan semua reaksi ikatan yang sebelumnya tidak diketahui.
Adalah perlu dan cukup bahwa jumlah usaha, semua gaya aktif yang diterapkan pada sistem untuk setiap kemungkinan pergerakan sistem, sama dengan nol.
Banyaknya persamaan yang dapat disusun untuk suatu sistem mekanis, berdasarkan prinsip perpindahan yang mungkin terjadi, sama dengan jumlah derajat kebebasan sistem mekanis tersebut.
literatur
- Targ S. M. Kursus singkat mekanika teoretis. Buku pelajaran untuk perguruan tinggi - edisi ke-10, direvisi. dan tambahan - M.: Lebih tinggi. sekolah, 1986.- 416 hal., sakit.
- Kursus dasar mekanika teoretis (bagian satu) N. N. Buchgolts, Nauka Publishing House, Kantor Redaksi Utama Sastra Fisika dan Matematika, Moskow, 1972, 468 hal.
Yayasan Wikimedia. 2010.
Lihat apa yang dimaksud dengan “Prinsip Kemungkinan Perpindahan” di kamus lain:
prinsip kemungkinan gerakan
Salah satu prinsip variasi mekanika, yang menetapkan kondisi umum keseimbangan mekanik. sistem. Menurut V. p.p., untuk keseimbangan mekanik. sistem dengan koneksi ideal (lihat SAMBUNGAN MEKANIK) perlu dan cukup bahwa jumlah kerja dAi... ... Ensiklopedia fisik
Kamus Ensiklopedis Besar
PRINSIP KEMUNGKINAN GERAKAN, agar suatu kesetimbangan suatu sistem mekanis perlu dan cukup bahwa jumlah kerja semua gaya yang bekerja pada sistem untuk setiap kemungkinan pergerakan sistem sama dengan nol. Prinsip kemungkinan gerakan diterapkan ketika... ... kamus ensiklopedis
Salah satu prinsip variasi mekanika (Lihat Prinsip variasi mekanika), yang menetapkan kondisi umum kesetimbangan sistem mekanik. Menurut V. p.p., untuk keseimbangan sistem mekanik dengan koneksi ideal (lihat Koneksi ... ... Ensiklopedia Besar Soviet
Prinsip kecepatan virtual, prinsip variasi diferensial mekanika klasik, mengungkapkan kondisi paling umum dari keseimbangan sistem mekanik yang dibatasi oleh koneksi ideal. Menurut V. p. p. mekan. sistem berada dalam keadaan setimbang... Ensiklopedia Matematika
Untuk mencapai keseimbangan suatu sistem mekanis, jumlah usaha yang dilakukan oleh semua gaya yang bekerja pada sistem untuk setiap kemungkinan pergerakan sistem harus sama dengan nol. Prinsip kemungkinan perpindahan diterapkan dalam studi kondisi keseimbangan... ... kamus ensiklopedis
Untuk keseimbangan mekanis. Penting dan cukup bagi sistem bahwa jumlah usaha yang dilakukan oleh semua gaya yang bekerja pada sistem untuk setiap kemungkinan pergerakan sistem adalah sama dengan nol. V. p. p. digunakan dalam mempelajari kondisi keseimbangan sistem mekanik yang kompleks. sistem... ... Ilmu pengetahuan Alam. kamus ensiklopedis
prinsip perpindahan maya- virtualiųjų poslinkių prinsip statusas T sritis fizika atitikmenys: engl. prinsip perpindahan maya vok. Prinzip der kebajikanllen Verschiebungen, n rus. prinsip perpindahan maya, m; prinsip kemungkinan gerakan, m pranc. prinsipnya … Terminal fisik
Salah satu prinsip variasi mekanika, menurut rum untuk kelas gerak mekanis tertentu dibandingkan satu sama lain. sistem, yang valid adalah yang fisiknya. ukuran, disebut tindakan, memiliki yang terkecil (lebih tepatnya, stasioner)… … Ensiklopedia fisik
Buku
- Mekanika teoretis. Dalam 4 volume. Jilid 3: Dinamika. Mekanika analitik. Teks kuliah. Hering Kementerian Pertahanan Federasi Rusia, Bogomaz Irina Vladimirovna. Buku teks ini berisi dua bagian dari satu mata kuliah mekanika teoretis: dinamika dan mekanika analitik. Bagian pertama membahas secara rinci permasalahan dinamika pertama dan kedua, juga...
Prinsip kemungkinan gerakan: untuk kesetimbangan sistem mekanis dengan sambungan ideal, jumlah kerja dasar semua gaya aktif yang bekerja padanya untuk setiap kemungkinan perpindahan harus sama dengan nol. atau dalam proyeksi: .
Prinsip kemungkinan perpindahan secara umum memberikan kondisi kesetimbangan untuk setiap sistem mekanik dan memberikan metode umum untuk menyelesaikan masalah statika.
Jika sistem mempunyai beberapa derajat kebebasan, maka persamaan prinsip gerak yang mungkin terjadi dikompilasi untuk masing-masing gerak bebas secara terpisah, yaitu. akan ada persamaan sebanyak sistem yang mempunyai derajat kebebasan.
Prinsip kemungkinan perpindahan berguna karena ketika mempertimbangkan sistem dengan ikatan ideal, reaksinya tidak diperhitungkan dan hanya perlu dioperasikan dengan gaya aktif.
Prinsip kemungkinan gerakan dirumuskan sebagai berikut:
Untuk materi. suatu sistem yang mengalami hubungan ideal berada dalam keadaan diam; perlu dan cukup bahwa jumlah usaha dasar yang dilakukan oleh gaya-gaya aktif pada kemungkinan perpindahan titik-titik dalam sistem adalah positif
Persamaan umum dinamika- ketika suatu sistem bergerak dengan koneksi ideal pada suatu saat tertentu, jumlah kerja dasar semua gaya aktif yang diterapkan dan semua gaya inersia pada setiap kemungkinan pergerakan sistem akan sama dengan nol. Persamaan ini menggunakan prinsip perpindahan yang mungkin terjadi dan prinsip D'Alembert dan memungkinkan Anda menyusun persamaan diferensial gerak sistem mekanis apa pun. Memberikan metode umum untuk memecahkan masalah dinamika.
Urutan kompilasi:
a) gaya-gaya tertentu yang bekerja padanya diterapkan pada setiap benda, dan gaya serta momen pasangan gaya inersia juga diterapkan secara kondisional;
b) menginformasikan sistem tentang kemungkinan pergerakan;
c) menyusun persamaan prinsip gerak yang mungkin terjadi, mengingat sistem berada dalam keadaan setimbang.
Perlu diperhatikan bahwa persamaan umum dinamika juga dapat diterapkan pada sistem dengan sambungan tidak ideal, hanya saja dalam hal ini reaksi sambungan tidak ideal, seperti gaya gesekan atau momen gesekan gelinding, harus diklasifikasikan sebagai gaya aktif. .
Usaha pada kemungkinan perpindahan gaya aktif dan gaya inersia dicari dengan cara yang sama seperti usaha dasar pada perpindahan aktual:
Kemungkinan kerja paksa: .
Kemungkinan usaha momen tersebut (pasangan gaya): .
Koordinat umum dari sistem mekanis adalah parameter q 1 , q 2 , ..., q S, independen satu sama lain, dari dimensi apa pun, yang secara unik menentukan posisi sistem setiap saat.
Jumlah koordinat umum sama dengan S - jumlah derajat kebebasan sistem mekanik. Posisi setiap titik sistem, yaitu vektor jari-jarinya, secara umum selalu dapat dinyatakan sebagai fungsi koordinat umum:
Persamaan umum dinamika pada koordinat umum tampak seperti sistem persamaan S sebagai berikut:
……..………. ;
………..……. ;
berikut adalah gaya umum yang sesuai dengan koordinat umum:
a adalah gaya inersia umum yang sesuai dengan koordinat umum:
Banyaknya kemungkinan pergerakan yang saling bebas dari suatu sistem disebut jumlah derajat kebebasan sistem tersebut. Misalnya. sebuah bola pada suatu bidang dapat bergerak ke segala arah, tetapi setiap kemungkinan pergerakan bola tersebut dapat diperoleh sebagai jumlah geometri dari dua pergerakan sepanjang dua sumbu yang saling tegak lurus. Benda tegar bebas mempunyai 6 derajat kebebasan.
Kekuatan yang digeneralisasi. Untuk setiap koordinat umum, seseorang dapat menghitung gaya umum yang sesuai Qk.
Perhitungan dilakukan menurut aturan ini.
Untuk menentukan kekuatan umum Qk, sesuai dengan koordinat umum qk, Anda perlu menambah koordinat ini (menambah koordinat sebesar ini), membiarkan semua koordinat lainnya tidak berubah, menghitung jumlah kerja semua gaya yang diterapkan pada sistem pada perpindahan titik-titik yang sesuai dan membaginya dengan pertambahan koordinat:
dimana perpindahannya Saya-titik sistem itu, diperoleh dengan mengubah k-koordinat umum itu.
Gaya umum ditentukan dengan menggunakan usaha dasar. Oleh karena itu, gaya ini dapat dihitung secara berbeda:
Dan karena ada pertambahan vektor jari-jari karena pertambahan koordinat dengan koordinat dan waktu konstan lainnya T, relasi tersebut dapat didefinisikan sebagai turunan parsial. Kemudian
dimana koordinat titik merupakan fungsi dari koordinat umum (5).
Jika sistemnya konservatif, yaitu pergerakan terjadi di bawah pengaruh gaya-gaya medan potensial, yang proyeksinya adalah , di mana , dan koordinat titik-titik merupakan fungsi dari koordinat umum, maka
Gaya umum sistem konservatif adalah turunan parsial energi potensial sepanjang koordinat umum yang bersesuaian dengan tanda minus.
Tentu saja, ketika menghitung gaya umum ini, energi potensial harus ditentukan sebagai fungsi dari koordinat umum
P = P( Q 1 , Q 2 , Q 3 ,…,qs).
Catatan.
Pertama. Saat menghitung gaya reaksi umum, ikatan ideal tidak diperhitungkan.
Kedua. Dimensi gaya umum bergantung pada dimensi koordinat umum.
Persamaan Lagrange jenis ke-2 diturunkan dari persamaan umum dinamika dalam koordinat umum. Jumlah persamaan sesuai dengan jumlah derajat kebebasan:
Untuk menyusun persamaan Lagrange jenis ke-2, koordinat umum dipilih dan kecepatan umum ditemukan . Energi kinetik sistem ditemukan, yang merupakan fungsi dari kecepatan umum , dan, dalam beberapa kasus, koordinat umum. Operasi diferensiasi energi kinetik yang disediakan oleh sisi kiri persamaan Lagrange dilakukan.Ekspresi yang dihasilkan disamakan dengan gaya umum, untuk mencarinya, selain rumus (26), berikut ini sering digunakan saat menyelesaikan masalah:
Pembilang di sebelah kanan rumus adalah jumlah karya dasar semua gaya aktif pada kemungkinan perpindahan sistem yang sesuai dengan variasi koordinat umum ke-i - . Dengan kemungkinan pergerakan ini, semua koordinat umum lainnya tidak berubah. Persamaan yang dihasilkan merupakan persamaan diferensial gerak sistem mekanik dengan S derajat kebebasan.
1. Koordinat umum dan jumlah derajat kebebasan.
Ketika suatu sistem mekanis bergerak, semua titiknya tidak dapat bergerak sembarangan, karena dibatasi oleh sambungan. Artinya tidak semua koordinat titik bersifat independen. Posisi titik ditentukan dengan hanya menentukan koordinat independen.
koordinat umum. Untuk sistem holonomis (yaitu sistem yang hubungannya dinyatakan dengan persamaan yang hanya bergantung pada koordinat), jumlah koordinat umum independen dari sistem mekanis sama dengan jumlah derajat kebebasan sistem ini.
Contoh:
Posisi semua titik ditentukan secara unik oleh sudut rotasi
engkol.
Satu derajat kebebasan.
2. Posisi suatu titik bebas dalam ruang ditentukan oleh tiga koordinat yang tidak bergantung satu sama lain. Itu sebabnya tiga derajat kebebasan.
3. Benda berputar kaku, posisinya ditentukan oleh sudut putaran J . Satu derajat kebebasan.
4. Sebuah benda tegar bebas yang geraknya ditentukan oleh enam persamaan - enam derajat kebebasan.
2. Kemungkinan pergerakan sistem mekanik.
Koneksi yang ideal.
Mungkin perpindahan adalah gerakan imajiner yang sangat kecil yang diperbolehkan pada saat tertentu oleh hubungan yang dikenakan pada sistem. Kemungkinan pergerakan titik-titik suatu sistem mekanis dianggap sebagai besaran orde pertama yang lebih kecil, oleh karena itu, pergerakan titik-titik yang lengkung digantikan oleh segmen-segmen lurus yang diplot secara tangensial terhadap lintasan pergerakan titik-titik dan dilambangkan dS.

dS A = dj . O.A.
Semua gaya yang bekerja pada suatu titik material dibagi menjadi gaya spesifik dan gaya reaksi.
Jika jumlah usaha yang dilakukan oleh reaksi-reaksi ikatan pada setiap kemungkinan perpindahan sistem sama dengan nol, maka ikatan tersebut disebut ideal.
![]()
3. Prinsip kemungkinan gerakan.
Untuk keseimbangan suatu sistem mekanis dengan ikatan ideal, jumlah kerja dasar semua gaya aktif yang bekerja padanya untuk setiap kemungkinan pergerakan sistem harus sama dengan nol.
![]()
Arti prinsip kemungkinan gerakan:
1. Hanya kekuatan aktif yang diperhitungkan.
2. Memberikan bentuk umum kondisi kesetimbangan untuk setiap sistem mekanis, sedangkan dalam statika perlu mempertimbangkan kesetimbangan masing-masing benda dalam sistem secara terpisah.
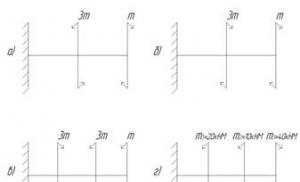
Tugas.

Untuk posisi tertentu mekanisme penggeser engkol dalam kesetimbangan, tentukan hubungan antara momen dan gaya jika OA = ℓ.
![]()
![]()
Persamaan umum dinamika.
Prinsip kemungkinan perpindahan memberikan metode umum untuk menyelesaikan masalah statika. Di sisi lain, prinsip d'Alembert memungkinkan penggunaan metode statika untuk menyelesaikan masalah dinamis. Oleh karena itu, dengan menerapkan kedua prinsip tersebut secara bersamaan, dapat diperoleh metode umum penyelesaian masalah dinamika.
Mari kita pertimbangkan sistem mekanis yang dikenakan batasan ideal. Jika gaya inersia yang bersesuaian ditambahkan ke semua titik sistem, kecuali gaya aktif dan reaksi kopling yang bekerja padanya, maka menurut prinsip d'Alembert, sistem gaya yang dihasilkan akan berada dalam kesetimbangan. Dengan menerapkan prinsip gerak yang mungkin, kita peroleh:
Karena koneksinya ideal, maka:
![]()
![]()
Kesetaraan ini mewakili persamaan umum dinamika.
Ini mengikuti darinya prinsip d'Alembert-Lagrange– ketika suatu sistem bergerak dengan koneksi ideal pada setiap momen waktu, jumlah kerja dasar semua gaya aktif yang diterapkan dan semua gaya inersia pada setiap kemungkinan pergerakan sistem akan sama dengan nol.
Tugas.

Di lift ke gigi 2 berat 2G dengan radius R 2 =R torsi diterapkan M = 4GR.
Tentukan percepatan beban yang diangkat A berat G, mengabaikan berat tali dan gesekan pada gandar. Sebuah drum yang talinya dililitkan, dan sebuah roda gigi dipasang dengan kuat padanya 1 , memiliki berat total 4G dan radius girasi r = R. Jari-jari drum RA = R dan roda gigi 1
R 1 =0,5R.
Mari kita gambarkan semua gaya yang bekerja, arah percepatan dan kemungkinan perpindahan.

________________
![]()


Mari kita substitusikan ke dalam persamaan umum dinamika
Mari kita nyatakan perpindahan dalam sudut rotasi δφ 1
![]()
Mari kita gantikan nilainya
δφ 1 ≠0
Mari kita nyatakan semua percepatan melalui yang diperlukan A A dan samakan ekspresi dalam tanda kurung dengan nol

![]()
Mari kita gantikan nilainya



Prinsip kemungkinan gerakan.
 a = 0,15m
a = 0,15m
b = 2a = 0,3m
m = 1,2 Nm _________________
x B; di B; TIDAK; Mp
Larutan: Mari kita cari reaksi dari dukungan bergerak A mengapa mari kita secara mental membuang hubungan ini, mengganti aksinya dengan reaksi tidak ada

Kemungkinan pergerakan batang AC adalah rotasinya di sekitar engsel DENGAN pada suatu sudut dj. Inti Matahari tetap tidak bergerak.
Mari kita buat persamaan kerja, dengan memperhatikan bahwa kerja gaya-gaya saat memutar suatu benda sama dengan hasil kali momen gaya relatif terhadap pusat rotasi dan sudut rotasi benda.
Untuk mengetahui reaksi pengikatan kaku pada suatu penyangga DI DALAM cari dulu momen reaksinya Tn. Untuk melakukan ini, mari kita buang sambungan yang mencegah perputaran batang Matahari, mengganti pengikat kaku dengan penyangga tetap berengsel dan menerapkan momen Tn .

Mari kita beri tahu batang tersebut kemungkinan rotasi berdasarkan suatu sudut DJ 1.
Mari kita buat persamaan kerja untuk batang tersebut Matahari:
Mari kita definisikan perpindahannya:
![]()

Untuk menentukan komponen vertikal dari reaksi pengikatan kaku, kita membuang sambungan yang mencegah pergerakan vertikal suatu titik DI DALAM, mengganti pengikat kaku dengan pengikat geser (rotasi tidak mungkin dilakukan) dan menerapkan reaksi:

Mari kita beri tahu sisi kiri (batang) Matahari dengan penggeser DI DALAM) kemungkinan kecepatan V B gerakan maju ke bawah. Inti AC akan berputar pada suatu titik A .
Mari kita buat persamaan kerja:
![]()


Untuk menentukan komponen horizontal dari reaksi pengikatan kaku, kita membuang sambungan yang mencegah pergerakan horizontal suatu titik DI DALAM mengganti segel kaku dengan segel geser dan menerapkan reaksi:
Mari kita beri tahu sisi kiri (slider) DI DALAM bersama dengan tongkatnya Matahari) kemungkinan kecepatan V B gerakan maju ke kiri. Sejak dukungan A pada roller, maka sisi kanan akan bergerak maju dengan kecepatan yang sama. Karena itu .
Mari kita buat persamaan kerja untuk keseluruhan struktur.
Untuk memeriksa kebenaran penyelesaiannya, kita buat persamaan kesetimbangan untuk keseluruhan sistem:
Syaratnya terpenuhi.
Menjawab: kamu B = -14,2 Jam; X B = -28,4 Jam; NA = 14,2 jam; V P =3,33 Nm.
Kecepatan umum. Kekuatan yang digeneralisasi.
Besaran bebas yang secara unik menentukan posisi semua titik suatu sistem mekanik disebut koordinat umum. – Q
Jika sistem memiliki S derajat kebebasannya, maka posisinya akan ditentukan S koordinat umum:
pertanyaan 1; pertanyaan 2; ...; qs.
Karena koordinat umum tidak bergantung satu sama lain, pertambahan dasar koordinat ini juga tidak bergantung:
dq 1 ; dq 2 ; ...; dq S .
Apalagi masing-masing jumlahnya dq 1 ; dq 2 ; ...; dq S menentukan kemungkinan pergerakan sistem yang sesuai, tidak bergantung pada yang lain.
Ketika sistem bergerak, koordinat umum akan terus berubah seiring waktu; hukum gerak ini ditentukan oleh persamaan:
, …. ,
Ini adalah persamaan gerak sistem dalam koordinat umum.
Turunan dari koordinat umum terhadap waktu disebut kecepatan umum sistem:
Ukuran tergantung pada ukuran Q.
Pertimbangkan sistem mekanis yang terdiri dari n titik material tempat gaya bekerja F 1 , F 2 , F n. Biarkan sistem melakukannya S derajat kebebasan dan posisinya ditentukan oleh koordinat umum pertanyaan 1; pertanyaan 2; pertanyaan 3. Mari kita informasikan sistem tentang kemungkinan pergerakan di mana koordinatnya pertanyaan 1 mendapat kenaikan dq 1, dan koordinat lainnya tidak berubah. Kemudian vektor jari-jari titik tersebut mendapat kenaikan dasar (dr k) 1. Ini adalah pertambahan yang diterima vektor jari-jari ketika hanya koordinatnya yang berubah pertanyaan 1 berdasarkan jumlah dq 1. Koordinat lainnya tetap tidak berubah. Itu sebabnya (dr k) 1 dihitung sebagai diferensial parsial:

Mari kita hitung kerja dasar dari semua gaya yang diterapkan:

Mari kita keluarkan dari tanda kurung dq 1, kita mendapatkan:

Di mana - kekuatan yang digeneralisasi.
Jadi, kekuatan umum – ini adalah koefisien pertambahan koordinat umum.
Perhitungan gaya umum direduksi menjadi perhitungan kemungkinan usaha dasar.
Jika semua orang berubah Q, Itu:
Menurut prinsip perpindahan yang mungkin terjadi, agar sistem berada dalam kesetimbangan, hal itu perlu dan cukup SdА а к = 0. Dalam koordinat umum Pertanyaan 1. dq 1 + Q 2 . dq 2 + … + Q s . dq s = 0 karena itu, Untuk keseimbangan sistem perlu dan cukup bahwa gaya-gaya umum yang sesuai dengan kemungkinan perpindahan yang dipilih untuk sistem, dan oleh karena itu koordinat umum, sama dengan nol.
Q 1 = 0; Q2 = 0; … Q s = 0.
Persamaan Lagrange.
Dengan menggunakan persamaan dinamik umum suatu sistem mekanik, persamaan gerak sistem mekanik dapat dicari.
4) menentukan energi kinetik sistem, menyatakan energi ini dalam bentuk kecepatan umum dan koordinat umum;
5) temukan turunan parsial yang sesuai dari T oleh dan dan substitusikan semua nilai ke dalam persamaan.
Teori dampak.
Pergerakan suatu benda di bawah aksi gaya-gaya biasa ditandai dengan perubahan terus-menerus dalam modul dan arah kecepatan benda tersebut. Namun, ada kasus ketika kecepatan titik-titik pada benda, dan juga momentum benda tegar, mengalami perubahan terbatas dalam periode waktu yang sangat singkat.
Fenomena, yang dalam selang waktu yang sangat singkat, kecepatan titik-titik pada benda berubah sejumlah tertentu disebut meniup.
Kekuatan, di bawah tindakan yang menimbulkan dampak, disebut drum.
Jangka waktu yang singkat T, di mana dampak terjadi disebut waktu dampak.
Karena gaya tumbukan sangat besar dan berubah dalam batas yang signifikan selama tumbukan, dalam teori tumbukan, bukan gaya tumbukan itu sendiri, melainkan impulsnya yang dianggap sebagai ukuran interaksi benda.
Impuls kekuatan non-dampak dari waktu ke waktu T akan menjadi nilai yang sangat kecil dan dapat diabaikan.
Teorema perubahan momentum suatu titik pada tumbukan:
Di mana ay– kecepatan titik pada awal tumbukan,
kamu– kecepatan titik pada akhir tumbukan.
Persamaan dasar teori dampak.

Perpindahan titik-titik dalam waktu yang sangat singkat, yaitu pada saat tumbukan, juga akan kecil, oleh karena itu kita menganggap benda tersebut tidak bergerak.
Jadi, kita dapat menarik kesimpulan berikut tentang aksi gaya tumbukan:
1) aksi kekuatan-kekuatan non-dampak selama tumbukan dapat diabaikan;
2) perpindahan titik-titik benda pada saat tumbukan dapat diabaikan dan benda dianggap tidak bergerak pada saat tumbukan;
prinsip kecepatan virtual - diferensial prinsip variasi mekanika klasik, menyatakan kondisi paling umum untuk keseimbangan sistem mekanis yang dibatasi oleh ikatan ideal.
Menurut V. p. p. mekan. sistem berada dalam kesetimbangan pada posisi tertentu jika dan hanya jika jumlah kerja dasar gaya-gaya aktif tertentu pada setiap kemungkinan perpindahan yang mengeluarkan sistem dari posisi tersebut adalah nol atau kurang dari nol:
pada waktu tertentu.
Kemungkinan pergerakan (virtual) dari sistem disebut. pergerakan dasar (sangat kecil) dari titik-titik sistem, yang diperbolehkan pada saat tertentu melalui hubungan yang dikenakan pada sistem. Jika sambungannya bertahan (dua arah), maka kemungkinan pergerakannya dapat dibalik, dan dalam kondisi (*) harus diambil tanda sama dengan; jika sambungannya tidak menahan (satu sisi), maka di antara kemungkinan pergerakan ada yang tidak dapat diubah. Ketika sistem bergerak di bawah pengaruh gaya aktif, sambungan bekerja pada titik-titik sistem dengan gaya reaksi tertentu (gaya pasif), yang dalam definisinya diasumsikan bahwa gaya mekanis diperhitungkan sepenuhnya. pengaruh ikatan pada sistem (dalam arti bahwa ikatan dapat digantikan oleh reaksi yang ditimbulkannya) (aksioma pembebasan). Koneksi disebut ideal jika jumlah kerja elementer dari reaksi-reaksinya, dengan tanda sama dengan berlaku untuk kemungkinan gerak reversibel, dan tanda sama dengan atau lebih besar dari nol untuk gerak tak dapat balik. Posisi keseimbangan suatu sistem adalah posisi seperti itu ![]() di mana sistem akan tetap ada sepanjang waktu jika ditempatkan pada posisi ini dengan kecepatan awal nol, sementara persamaan kendala diasumsikan dipenuhi untuk setiap nilai t. Gaya aktif dalam kasus umum diasumsikan mempunyai fungsi dan dalam kondisi (*) harus diperhatikan
di mana sistem akan tetap ada sepanjang waktu jika ditempatkan pada posisi ini dengan kecepatan awal nol, sementara persamaan kendala diasumsikan dipenuhi untuk setiap nilai t. Gaya aktif dalam kasus umum diasumsikan mempunyai fungsi dan dalam kondisi (*) harus diperhatikan
Kondisi (*) berisi semua persamaan dan hukum kesetimbangan sistem dengan koneksi ideal, sehingga kita dapat mengatakan bahwa semua statika direduksi menjadi satu rumus umum (*).
Hukum kesetimbangan yang diungkapkan oleh V.p.p. pertama kali ditetapkan oleh Guido Ubaldi pada tuas dan pada balok atau katrol yang bergerak. G. Galilei menetapkannya untuk bidang miring dan menganggap hukum ini sebagai sifat umum keseimbangan mesin sederhana. J. Wallis meletakkannya sebagai dasar statika dan dari situ diturunkan teori keseimbangan mesin. R. Descartes mereduksi semua statika menjadi satu prinsip, yang pada dasarnya bertepatan dengan prinsip Galileo. J. Bernoulli adalah orang pertama yang memahami keumuman V. p.p. dan kegunaannya dalam memecahkan masalah statika. J. Lagrange menyatakan V. p. p. dalam bentuk umum dan dengan demikian mereduksi semua statika menjadi satu rumus umum; dia memberikan bukti (tidak sepenuhnya ketat) dari V. p. p. untuk sistem yang dibatasi oleh koneksi dua arah (menahan). Rumus umum statika untuk kesetimbangan sistem gaya apa pun dan metode penerapan rumus ini yang dikembangkan oleh J. Lagrange secara sistematis digunakan olehnya untuk memperoleh sifat-sifat umum kesetimbangan suatu sistem benda dan untuk memecahkan berbagai masalah statika. , termasuk masalah kesetimbangan fluida yang tidak dapat dimampatkan, serta fluida yang dapat dimampatkan dan elastis. J. Lagrange menganggap V. p. p. sebagai prinsip dasar semua mekanika. Bukti yang kuat tentang V. p.p., serta perluasannya ke koneksi satu arah (tidak mengandung) diberikan oleh J. Fourier dan M. V. Ostrogradsky.
menyala.: Lagrange J., Mecanique analytiquc, P., 1788 (Terjemahan Rusia: Lagrange J., Mekanika analitik, M.-L., 1950); Fourier J., "J. de 1" Ecole Polytechnique", 1798, t. II, hal. 20; Ostrogradsky M.V., Kuliah tentang mekanika analitik, Koleksi karya, vol. 1 ,
Bagian 2, M.-L., 1946.
- - prinsip kecepatan virtual, - prinsip variasi diferensial mekanika klasik, yang menyatakan kondisi paling umum untuk keseimbangan sistem mekanis yang dibatasi oleh koneksi ideal...
Ensiklopedia Matematika
- - Gagasan bahwa masa kini mungkin tidak hanya memiliki satu, tetapi beberapa arah pembangunan di masa depan mungkin selalu ada dalam budaya...
Ensiklopedia Kajian Budaya
- - serangkaian tindakan untuk menilai kondisi tangki, saluran pipa produk, katup dan perangkat penutup, komponen dan rakitan dalam produksi berbahaya, sarana penyimpanan dan pengangkutan barang berbahaya,...
Perlindungan sipil. Kamus konseptual dan terminologis
- - konstruksi grafis dari pergerakan titik-titik sistem batang sesuai dengan deformasi longitudinal batang yang diberikan - diagram di lokasi - translokační obrazec - Verschiebungsplan - elmozdulásábra - diagram šilzhiltiyn - wykres przesunięć -...
Kamus konstruksi
- - metode mekanika struktur untuk menentukan gaya dan perpindahan dalam sistem struktur statis tak tentu, di mana perpindahan linier dan sudut dipilih sebagai hal utama yang tidak diketahui - metode...
Kamus konstruksi
- - memperkirakan besarnya dan struktur kerugian sanitasi dalam situasi darurat yang mungkin terjadi, memungkinkan untuk menentukan volume pekerjaan yang akan datang untuk memberikan perawatan medis, mengevakuasi korban cedera,...
Daftar istilah darurat
- - - metode analisis logis konsep modal dan intensional, yang dasarnya adalah pertimbangan keadaan yang mungkin terjadi...
Ensiklopedia Filsafat
- - SEMANTIK DUNIA YANG MUNGKIN - seperangkat konstruksi semantik untuk interpretasi berbasis kebenaran dari penghubung logis non-klasik, fitur utamanya adalah pengenalan pertimbangan seperti...
Ensiklopedia Epistemologi dan Filsafat Ilmu Pengetahuan
- - sensor yang mengubah gerakan mekanis menjadi perubahan gaya atau tegangan arus listrik, dirancang untuk merekam proses fisiologis...
Kamus kedokteran besar
- - Teorema Maxwell - adalah bahwa untuk benda yang mengalami deformasi linier, perpindahan sigma dari titik penerapan gaya satuan Pk keadaan pertama ke arah aksinya, yang disebabkan oleh gaya satuan lainnya...
- - Diagram Villot, - geometris. suatu konstruksi yang menentukan pergerakan semua simpul pada rangka datar berdasarkan perubahan panjang batangnya yang diketahui. Lihat gambar. Untuk Seni. Diagram perpindahan: a - diagram pertanian...
Kamus Besar Ensiklopedis Politeknik
- - Teorema Maxwell, adalah bahwa untuk benda yang mengalami deformasi linier, perpindahan δki dari titik penerapan gaya satuan Pk keadaan pertama ke arah aksinya, disebabkan oleh gaya satuan lainnya Pi...
- - salah satu prinsip variasi mekanika, yang menetapkan kondisi umum untuk keseimbangan sistem mekanik...
Ensiklopedia Besar Soviet
- - Prinsip KEMUNGKINAN GERAKAN - untuk keseimbangan sistem mekanis, jumlah kerja semua gaya yang bekerja pada sistem untuk setiap kemungkinan pergerakan sistem harus sama dengan nol. Mungkin...
Kamus ensiklopedis besar
- - adj., jumlah sinonim: 1 tidak ada...
Kamus sinonim
- - adj., jumlah sinonim: 2 cemburu bersemangat...
Kamus sinonim
"PRINSIP GERAKAN KEMUNGKINAN" dalam buku
Tipologi gerakan sosial
Dari buku Filsafat Sosial pengarang Krapvensky Solomon EliazarovichTipologi gerakan sosial Pertama-tama, P. Sorokin mengidentifikasi dua jenis utama mobilitas sosial - horizontal dan vertikal. Contoh mobilitas horizontal termasuk perpindahan seseorang dari penganut agama Baptis ke agama Metodis
12. (NP5) Prinsip NP yang kelima adalah prinsip perbaikan atau prinsip alam semesta
Dari buku Perjalanan Menuju Diri Sendiri (0.73) pengarang Artamonov Denis12. (NP5) Prinsip kelima NP adalah prinsip perbaikan atau prinsip alam semesta.Prinsip kelima merupakan kelanjutan logis - penambahan prinsip keempat. Dengan bantuannya, saya ingin menarik kesejajaran tertentu antara tujuan, makna Alam Semesta itu sendiri, dan aktivitas kita
Teknik gerakan
Dari buku Buku Kecil Capoeira pengarang Capoeira NestorTeknik gerak Kini, dengan meninggalkan teori murni, kita telah mencapai titik di mana seorang pemula mulai diajari jogo yang sebenarnya, permainan capoeira. Metodologi yang diuraikan di bawah ini agak berbeda dengan yang digunakan selama lima puluh tahun terakhir (sejak Bimba
Prinsip kemungkinan gerakan
Dari buku Great Soviet Encyclopedia (VO) oleh penulis tsbPrinsip gerakan timbal balik
Dari buku Great Soviet Encyclopedia (VZ) oleh penulis tsbBagaimana memastikan anonimitas pergerakan di Internet saat melawan PR hitam
Dari buku Melawan PR Hitam di Internet pengarang Kuzin Alexander VladimirovichBagaimana memastikan anonimitas gerakan di Internet saat melawan PR hitam Karena musuh yang menyerang Anda di Internet dapat menimbulkan ancaman bagi kehidupan dan kesehatan Anda, kami menganggap perlu untuk membahas secara rinci masalah memastikan
Dari buku AutoCAD 2009 untuk pelajar. Panduan instruksi mandiri pengarang Sokolova Tatyana YurievnaAnimasi gerakan saat berjalan dan terbang berkeliling
Dari buku AutoCAD 2008 untuk pelajar: tutorial populer pengarang Sokolova Tatyana YurievnaAnimasi Berjalan dan Terbang Animasi gerak memberikan pratinjau gerakan apa pun, termasuk berjalan dan terbang di sekitar gambar. Sebelum Anda membuat animasi jalur, Anda perlu membuat pratinjau. Tim
Animasi gerakan saat berjalan dan terbang berkeliling
Dari buku AutoCAD 2009. Kursus pelatihan pengarang Sokolova Tatyana YurievnaAnimasi Berjalan dan Terbang Animasi gerak memberikan pratinjau gerakan apa pun, termasuk berjalan dan terbang di sekitar gambar. Sebelum Anda membuat animasi jalur, Anda perlu membuat pratinjau. Tim
Animasi gerakan saat berjalan dan terbang berkeliling
Dari buku AutoCAD 2009. Mari kita mulai! pengarang Sokolova Tatyana YurievnaAnimasi Berjalan dan Terbang Animasi gerak memberikan pratinjau gerakan apa pun, termasuk berjalan dan terbang di sekitar gambar. Sebelum Anda membuat animasi jalur, Anda perlu membuat pratinjau. Tim
DOVECOTE: Dialektika sebagai cerminan pergerakan musiman
Dari buku Majalah Computerra No. 20 tanggal 29 Mei 2007 pengarang Majalah ComputerraDOVECOTE: Dialektika sebagai cerminan pergerakan musiman Penulis: Sergei Golubitsky “Saya hampir tidak mengerti apa-apa. Dan yang paling penting, saya tidak mengerti apa hubungannya komputer dengan itu. Saya pikir jika artikel ini tidak ada, dunia tidak akan kehilangan banyak hal.” Pengguna "Ramses" di forum Computerra ditujukan kepada
“Dari kemungkinan teman, dari kemungkinan hinaan…”
Dari buku Burung Tak Terlihat pengarang Chervinskaya Lidiya Davydovna“Dari kemungkinan teman, dari kemungkinan hinaan...” Dari kemungkinan teman, dari kemungkinan hinaan, Dari kemungkinan, bagaimanapun juga, setengah pengakuan, Dari kemungkinan kebahagiaan, hatiku sangat sakit... - Selamat tinggal. Kami melewati jembatan mainan di atas sungai, dan dari mana asalnya di kota ini?
10.6 Perencanaan perjalanan
Dari buku Manajemen Sumber Daya Manusia: Panduan Studi pengarang10.6 Merencanakan pergerakan Memuaskan banyak kebutuhan dan memenuhi harapan berhubungan langsung dengan isi pekerjaan, karena pekerjaan menempati tempat terpenting dalam kehidupan seseorang, dan seseorang tidak peduli untuk apa ia mengabdikan sebagian besar hidupnya.
Perencanaan perjalanan
Dari buku Manajemen Sumber Daya Manusia untuk Manajer: Panduan Studi pengarang Spivak Vladimir AlexandrovichPerencanaan perjalanan Kepuasan berbagai kebutuhan dan pemenuhan harapan berhubungan langsung dengan isi pekerjaan, karena seseorang tidak peduli untuk apa ia mengabdikan sebagian besar hidupnya. Memuaskan kebutuhan sering kali melibatkan melakukan sesuatu
Prinsip 4: Obat-obatan hanya boleh diminum jika risiko tidak meminumnya lebih besar daripada risiko efek samping yang mungkin terjadi.
Dari buku 10 langkah menuju pengelolaan kehidupan emosional Anda. Mengatasi kecemasan, ketakutan dan depresi melalui penyembuhan pribadi oleh Kayu Eva A.Prinsip 4: Obat-obatan hanya boleh diminum jika risiko tidak meminumnya lebih besar daripada risiko efek samping yang mungkin terjadi.Dengan kata lain, Anda perlu mempertimbangkan risiko dan manfaatnya. Setiap obat tidak hanya bermanfaat bagi Anda dan