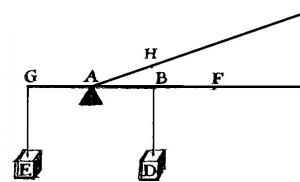
Связи в теоретической механике. Несвободные системы. связи и их реакции. Виды связей и их реакции
Связи и их реакции
По определению, тело, которое не скреплено с другими телами и может совершать из данного положения любые перемещения в пространстве, называется свободным (например, воздушный шар в воздухе). Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным . Все то, что ограничивает перемещения данного тела в пространстве, будем называть связью.
Например, тело лежащее на столе – несвободное тело. Связью его является плоскость стола, которая препятствует перемещению тела вниз.
Очень важен так называемый принцип освобождаемости , которым будем пользоваться в дальнейшем. Записывается он так.
Любое несвободное тело можно сделать свободным, если связи убрать, а действие их на тело заменить силами, такими, чтобы тело оставалось в равновесии.
Сила, с которой данная связь действует на тело, препятствуя тем ила иным его перемещениям, называется силой реакции (противодействия) связи или просто реакцией связи.
Так у тела, лежащего на столе, связь – стол. Тело несвободное. Сделаем его свободным – стол уберем, а чтобы тело осталось в равновесии, заменим стол силой, направленной вверх и равной, конечно, весу тела.
Направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу. Когда связь одновременно препятствует перемещениям тела по нескольким направлениям, направление реакции связи также наперед неизвестно и должно определяться в результате решения рассматриваемой задачи.
Рассмотрим, как направлены реакции некоторых основных видов связей.
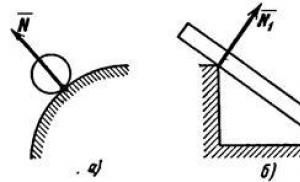
1. Гладкая плоскость (поверхность) или опора. Гладкой будем называть поверхность, трением о которую данного тела можно в первом приближении пренебречь. Такая поверхность не дает телу перемещаться только по направлению общего перпендикуляра (нормали) к поверхностям соприкасающихся тел в точке их касания (рис.14,а ). Поэтому реакция N гладкой поверхности или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена в этой точке. Когда одна из соприкасающихся поверхностей является точкой (рис. 14,б ), то реакция направлена по нормали к другой поверхности.
Если поверхности не гладкие, надо добавить еще одну силу – силу трения , которая направлена перпендикулярно нормальной реакциив сторону, противоположную возможному скольжению тела.


Рис.14 Рис.15

Рис.16
2. Нить. Связь, осуществленная в виде гибкой нерастяжимой нити (рис.15), не дает телу М удаляться от точки подвеса нити по направлению AM . Поэтому реакция Т натянутой нити направлена вдоль нити от тела к точке ее подвеса. Если даже заранее можно догадаться, что реакция направлена к телу, все равно ее надо направить от тела. Таково правило. Оно избавляет от лишних и ненужных предположений и, как убедимся далее, помогает установить сжат стержень или растянут.
3. Цилиндрический шарнир (подшипник). Если два тела соединены болтом, проходящим через отверстия в этих телах, то такое соединение называется шарнирным или просто шарниром; осевая линия болта называется осью шарнира. Тело АВ , прикрепленное шарниром к опоре D (рис.16,а ), может поворачиваться как угодно вокруг оси шарнира (в плоскости чертежа); при этом конец А тела не может переместиться ни по какому направлению, перпендикулярному к оси шарнира. Поэтому реакция R цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной к оси шарнира, т.е. в плоскости А ху. Для силы R в этом случае наперед не известны ни ее модуль R , ни направление (угол ).
4. Шаровой шарнир и подпятник. Этот вид связи закрепляет какую-нибудь точку тела так, что она не может совершать никаких перемещений в пространстве. Примерами таких связей служат шаровая пята, с помощью которой прикрепляется фотоаппарат к штативу (рис.16,б ) и подшипник с упором (подпятник) (рис. 16,в ). Реакция R шарового шарнира или подпятника может иметь любое направление в пространстве. Для нее наперед неизвестны ни модуль реакции R , ни углы, образуемые ею с осями х, у, z .

Рис.17
5. Стержень. Пусть в какой-нибудь конструкции связью является стержень АВ , закрепленный на концах шарнирами (рис.17). Примем, что весом стержня по сравнению с воспринимаемой им нагрузкой можно пренебречь. Тогда на стержень будут действовать только две силы приложенные в шарнирах А и В . Но если стержень АВ находится в равновесии, то по аксиоме 1 приложенные в точках А и В силы должны быть направлены вдоль одной прямой, т. е. вдоль оси стержня. Следовательно, нагруженный на концах стержень, весом которого по сравнению с этими нагрузками можно пренебречь, работает только на растяжение или на сжатие. Если такой стержень является связью, то реакция стержня будет направлена вдоль оси стержня.
6. Подвижная шарнирная опора (рис.18, опора А ) препятствует движению тела только в направлении перпендикулярном плоскости скольжения опоры. Реакция такой опоры направлена по нормали к поверхности, на которую опираются катки подвижной опоры.
7. Неподвижная шарнирная опора (рис.18, опора В ). Реакциятакой опоры проходит через ось шарнира и может иметь любое направление в плоскости чертежа. При решении задач будем реакцию изображать ее составляющимиипо направлениям осей координат. Если мы, решив задачу, найдеми, то тем самым будет определена и реакция; по модулю

Рис.18
Способ закрепления, показанный на рис.18, употребляется для того, чтобы в балке АВ не возникало дополнительных напряжений при изменении ее длины от изменения температуры или от изгиба.
Заметим, что если опору А балки (рис.18) сделать тоже неподвижной, то балка при действии на нее любой плоской системы сил будет статически неопределимой, так как тогда в три уравнения равновесия войдут четыре неизвестные реакции ,,,.
8. Неподвижная защемляющая опора или жесткая заделка (рис.19). В этом случае на заделанный конец балки со стороны опорных плоскостей действует система распределенных сил реакций. Считая эти силы приведенными к центру А , мы можем их заменить одной наперед неизвестной силой , приложенной в этом центре, и парой с наперед неизвестным моментом . Силу можно в свою очередь изобразить ее составляющими и. Таким образом, для нахождения реакции неподвижной защемляющей опоры надо определить три неизвестных величины,и.Если под такую балку где-нибудь в точке В подвести еще одну опору, то балка станет статически неопределимой.

Рис.19
При определении реакций связи других конструкций надо установить, разрешает ли она двигаться вдоль трех взаимно перпендикулярных осей и вращаться вокруг этих осей. Если препятствует какому-либо движению – показать соответствующую силу, если препятствует вращению – пару с соответствующим моментом.
Иногда приходится исследовать равновесие нетвердых тел. При этом будем пользоваться предположением, что если это нетвердое тело находится в равновесии под действием сил, то его можно рассматривать как твердое тело, используя все правила и методы статики.
Основной закон статики сформулирован для так называемых свободных систем , в которых все внешние силы являются задаваемыми , не зависящими от других сил. Вместе с тем, многие инженерные задачи сводятся к рассмотрению равновесия или движения систем, перемещения точек которых ограничены. В таких случаях возможно появление зависимости между внешними силами.
Тело, перемещениям которого в пространстве препятствуют какие-либо другие тела - связи , называют несвободным. В местах контакта системы со связью возникают силы.
Силу, с которой данная связь воздействует на тело, препятствуя его перемещению, называют силой реакции связи , или просто реакцией связи. Она равна по модулю силе давления на связь и противоположна ей по направлению. Введение реактивных сил приводит к разделению внешних сил, действующих на систему, на две группы:
- задаваемые (активные) - это силы, величины которых могут не зависеть от других сил и назначаться произвольно. Эти силы не исчезают при удалении всех связей;
- реакции связей (реактивные ) - это силы, появляющиеся после отбрасывания связей, величины которых зависят от активных сил. Реакции связей, как правило, неизвестны. Для их определения
надо решить задачу статики, рассматривая равновесие системы, или задачу исследования движения (в общем случае).
Указанный ранее подход учета влияния связей часто называют принципом освобождаемости. Заметим, что этот способ не является единственным. В гл. 4 изложена методика, согласно которой наличие связей учитывают на основании кинематических соображений.
Направление и точку приложения реакции связи в виде сосредоточенной силы устанавливают на основании опыта в зависимости от конструкции связи. Правильное определение направлений реакций связи очень важно при решении задач механики. Приведем некоторые примеры связей и их реакций.
Гладкая поверхность - это поверхность, трением о которую можно пренебречь (связи без трения относятся к так называемым идеальным связям). Реакция N гладкой поверхности или опоры направлена по общей нормали к поверхностям соприкосновения тел в точке касания и приложена к этой точке (рис. 1.10,я). В случае, когда поверхности контакта тела и связи - плоскости, положение точки приложения реакции (координатах) заранее не определено и находится из условий равновесия (рис. 1.10,6). Если одна из соприкасающихся поверхностей в месте контакта вырождается в точку, то реакция направлена по нормали к другой поверхности (рис. 1.10,с).
Рис. 1.10.
Нить. Реакция связи Г, выполненной в виде гибкой нити, направлена вдоль нити к точке ее подвеса (рис. 1.11).

Рис. 1.11.
Цилиндрический шарнир (подшипник). В зависимости от системы сил, приложенной к телу, вал шарнира может прижиматься к различным точкам внутренней поверхности «обоймы», из-за чего даже при отсутствии трения реакция такого шарнира неизвестна по направлению. Можно лишь утверждать, что главный вектор Я реактивных сил цилиндрического идеального шарнира расположен в
плоскости ху у перпендикулярной к оси шарнира, и проходит через центр шарнира. Для силы Я в этом случае наперед не известны ни
ее модуль
ни ее направление Za (рис. 1.12).

Рис. 1.12.
При решении практических задач часто силу Я заменяют ее двумя эквивалентными составляющими, направленными вдоль осей координат X и У (см. рис. 1.12).
Ненагруженный стержень - это стержень, на который не действуют силы по его длине ЛВ (рис. 1.13). Две силы, приложенные на концах такого стержня УУ"и могут его уравновесить только
тогда, когда они равны по модулю и направлены по одной прямой в противоположные стороны. Следовательно, реакция N невесомого шарнирно закрепленного стержня направлена вдоль линии, соединяющей центры шарниров, которыми стержень прикреплен к рассматриваемому телу и другой связи.
В процессе решения задач статики для несвободного твердого тела обычно отбрасывают все связи и применяют условия равновесия для свободного тела.

Просмотр: эта статья прочитана 65709 раз
Pdf Выберите язык... Русский Украинский Английский
Краткий обзор
Полностью материал скачивается выше, предварительно выбрав язык
Техническая механика
Современное производство, определяющееся высокой механизацией и автоматизацией, предлагает использование большого количества разнообразных машин, механизмов, приборов и других устройств. Конструирование, изготовление, эксплуатация машин невозможна без знаний в области механики.
Техническая механика - дисциплина, вмещающая в себя основные механические дисциплины: теоретическую механику, сопротивление материалов, теорию машин и механизмов, детали машин и основы конструирования.
Теоретическая механика - дисциплина, которая изучает общие законы механического движения и механического взаимодействия материальных тел.
Теоретическая механика принадлежит к фундаментальным дисциплинам и создает основу многих инженерных дисциплин.
В основе теоретической механики лежат законы, называемые законами классической механики или законами Ньютона. Эти законы установлены путем обобщения результатов большого количества наблюдений и экспериментов. Справедливость их проверена многовековой практической деятельностью человека.
Статика - раздел теоретической механики. в котором изучаются силы, методы преобразования систем сил в эквивалентные и устанавливаются условия равновесия сил, приложенные к твердым телам.
Материальная точка - физическое тело определенной массы, размерами которого можно пренебречь при изучении его движения.
Система материальных точек или механическая система - это такая совокупность материальных точек, в которой положение и движение каждой точки зависят от положения и движения других точек этой системы.
Твердое тело является системой материальных точек.
Абсолютно твердое тело - тело, в котором расстояния между двумя произвольными его точками остаются неизменными. Считая тела абсолютно твердыми, не учитывают деформаций, которые возникают в реальных телах.
Сила F - величина, являющаяся мерой механического взаимодействия тел и определяющей интенсивность и направление этого взаимодействия.
Единицей измерения силы в системе СИ является ньютон (1 Н).
Как и для любого вектора, для силы можно найти проекции силы на оси координат.
Виды сил
Внутренними силами называют силы взаимодействия между точками (телами) данной системы
Внешними силами называются силы, действующие на материальные точки (тела) данной системы со стороны материальных точек (тел), не принадлежащих этой системе. Внешние силы (нагрузка) - это активные силы и реакции связи.
Нагрузки разделяются на:
- объемные - распределенные по объему тела и приложенные к каждой ее частице (собственный вес конструкции, силы магнитного притягивания, силы инерции).
- поверхностные
- приложенные к участкам поверхности и характеризующие непосредственное контактное взаимодействие объекта с окружающими телами:
- сосредоточенные - нагрузки, действующие по площадке, размеры которой малы сравнительно с размерами самого элемента конструкции (давление обода колеса на рельс) ;
- распределенные - нагрузки, действующие по площадке, размеры которой не малы сравнительно с размерами самого элемента конструкции (гусеницы трактора давят на балку моста); интенсивность нагрузки, распределенной вдоль длины элемента, q Н/м.
Аксиомы статики
Аксиомы отображают свойства сил, действующих на тело.
1.Аксиома инерции
(закон Галилея)
.
Под действием взаимно уравновешенных сил материальная точка (тело) находится в состоянии покоя или движется равномерно и прямолинейно.
2.Аксиома равновесия двух сил
.
Две силы, приложенные к твердому телу, будут уравновешенные только в случае, когда они равны по модулю и направлены вдоль одной прямой в противоположную сторону.
Вторая аксиома является условием равновесия тела под действием двух сил.
3.Аксиома добавления и отбрасывания уравновешенных сил.
Действие данной системы сил на абсолютно твердое тело не изменится, если к ней прибавить или изъять любую уравновешенную систему сил.
Следствие
. Не изменяя состояние абсолютно твердого тела, силу можно переносить вдоль ее линии действия в любую точку, сохраняя неизменными ее модуль и направление. Т.е., сила, приложенная к абсолютно твердому телу, является скользящим вектором.
4. Аксиома параллелограмма сил.
Равнодействующая двух сил, которые пересекаются в одной точке, приложена в точке их сечения и определяется диагональю параллелограмма, построенного на этих силах как сторонах.
5. Аксиома действия и противодействия.
Каждому действию соответствует равное по модулю и противоположное по направлению противодействие.
6. Аксиома равновесия сил, приложенных к деформируемому телу при его затвердевании (принцип затвердевания).
Равновесие сил, приложенных к деформируемому телу (изменяемой системе), сохраняется, если тело считать затвердевшим (идеальным, неизменным).
7. Аксиома освобождения тела от связей.
Не изменяя состояния тела, любое несвободное тело, можно рассматривать как свободное, если отбросить связи, а их действие заменить реакциями.
Связи и их реакции
Свободным телом называется такое тело, которое может осуществлять произвольные перемещения в пространстве в любом направлении.
Связями называются тела, ограничивающие движение данного тела в пространстве.
Свободным телом называется тело, перемещение которого в пространстве ограниченно другими телами (связями).
Реакцией связи (опоры) называется сила, с которой связь действует на данное тело.
Реакция связи всегда направлена противоположно тому направлению, в котором связь противодействует возможному движению тела.
Активная (заданная) сила , это сила, которая характеризует действие других тел на заданное, и вызывает или может вызвать изменение его кинематического состояния.
Реактивная сила - сила, которая характеризует действие связей на данное тело.
По аксиоме об освобождении тела от связей, любое несвободное тело можно рассматривать как свободное, освободив его от связей и заменив их действие реакциями. В этом заключается принцип освобождения от связей.
Система сходящихся сил
Система сходящихся сил − это система сил, линии действия которых пересекаются в одной точке.
Система сходящихся сил эквивалентная одной силе - равнодействующей , которая равняется векторной сумме сил и приложенная в точке сечения линий их действия.
Методы определения равнодействующей системы сходящихся сил.
- Метод параллелограммов сил - На основании аксиомы параллелограмма сил, каждые две силы данной системы, последовательно, приводятся к одной силе − равнодействующей.
- Построение векторного силового многоугольника - Последовательно, параллельным переносом каждого вектора силы в конечную точку предыдущего вектора, составляется многоугольник, сторонами которого являются векторы сил системы, а замыкающей стороной − вектор равнодействующей системы сходящихся сил.
Условия равновесия системы сходящихся сил.
- Геометрическое условие равновесия сходящейся системы сил: для равновесия системы сходящихся сил необходимо и достаточно, чтобы векторный силовой многоугольник, построенный на этих силах, был замкнутым.
- Аналитические условия равновесия системы сходящихся сил: для равновесия системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на координатные оси равнялись нулю.
Язык: русский, украинский
Формат: pdf
Размер: 800 КВ
Пример расчета прямозубой цилиндрической передачи
Пример расчета прямозубой цилиндрической передачи. Выполнен выбор материала, расчет допускаемых напряжений, расчет на контактную и изгибную прочность.
Пример решения задачи на изгиб балки
В примере построены эпюры поперечных сил и изгибающих моментов, найдено опасное сечение и подобран двутавр. В задаче проанализировано построение эпюр с помощью дифференциальных зависимостей, провелен сравнительный анализ различных поперечных сечений балки.
Пример решения задачи на кручение вала
Задача состоит в проверке прочности стального вала при заданном диаметре, материале и допускаемых напряжениях. В ходе решения строятся эпюры крутящих моментов, касательных напряжений и углов закручивания. Собственный вес вала не учитывается
Пример решения задачи на растяжение-сжатие стержня
Задача состоит в проверке прочности стального стержня при заданных допускаемых напряжениях. В ходе решения строятся эпюры продольных сил, нормальных напряжений и перемещений. Собственный вес стержня не учитывается
Применение теоремы о сохранении кинетической энергии
Пример решения задачи на применение теоремы о сохранение кинетической энергии механической системы
Если связь задаётся равенством, то говорят, что такая связь удерживающая или двусторонняя :
Если связь задаётся неравенством, то говорят, что такая связь неудерживающая или односторонняя :
Если функция зависит явно от времени, то говорят, что связь нестационарная или реономная . Если эта функция не зависит явно от времени, то говорят что эта связь стационарная или склерономная .
Литература
- Берёзкин Е. Н. Курс теоретической механики - 2-ое издание, переработанное и дополненное - М .: Изд-во МГУ - 1974 г., 645 с.
Wikimedia Foundation . 2010 .
Смотреть что такое "Связь (механика)" в других словарях:
- (от греч. mechanike (techne) наука о машинах, искусство построения машин), наука о механич. движении матер. тел и происходящих при этом вз ствиях между ними. Под механич. движением понимают изменение с течением времени взаимного положения тел или … Физическая энциклопедия
МЕХАНИКА РАЗВИТИЯ - МЕХАНИКА РАЗВИТИЯ. Содержание: История......................18 Материалы и методы исследования........20 Проблема детерминации.............22 Два основных типа формообразования......26 М. р. и регенерация................30 Практическое значение М … Большая медицинская энциклопедия
Химическая связь явление взаимодействия атомов, обусловленное перекрыванием электронных облаков, связывающихся частиц, которое сопровождается уменьшением полной энергии системы. Термин «химическое строение» впервые ввёл А. М. Бутлеров в 1861… … Википедия
Раздел физики, в котором изучается движение тел под действием сил. Механика охватывает очень широкий круг вопросов в ней рассматриваются объекты от галактик и систем галактик до мельчайших, элементарных частиц вещества. В этих предельных случаях… … Энциклопедия Кольера
Физика кристаллов Кристалл кристаллография Кристаллическая решётка Типы кристаллических решёток Дифракция в кристаллах Обратная решётка Ячейка Вигнера Зейтца Зона Бриллюэна Структурный фактор базиса Атомный фактор рассеяния Типы связей в… … Википедия
- [от греч. mechanike (téchne) наука о машинах, искусство построения машин], наука о механическом движении материальных тел и происходящих при этом взаимодействиях между телами. Под механическим движением понимают изменение с течением… … Большая советская энциклопедия
Напряжения в области контакта при одновременном нагружении нормальной и касательной силой. Напряжения определены методом фотоупругости Механика контактного взаимодействия занимается расчётом упругих, вязкоупругих и пластичных тел при статическом… … Википедия
СВЯЗЬ - средство приобщения предметов (А, В, С и т. д.) друг к другу, способ пребывания одного в другом, разных в их единстве; форма бытия многого в едином. Вступающими в С. предметами А, В, С и т. д. могут быть любые определенности материального и (или) … Современный философский словарь
- (волновая механика), теория, устанавливающая способ описания и законы движения микрочастиц (элем. ч ц, атомов, молекул, ат. ядер) и их систем (напр., кристаллов), а также связь величин, характеризующих ч цы и системы, с физ. величинами,… … Физическая энциклопедия
Книги
- , Вебстер А.Г. , Эта книга создалась из лекций, которые я в продолжение последних четырнадцати лет читал в Clark University, главным образом, для моих слушателей курса физики. Очевидно, что она не… Категория: Математика Издатель: ЁЁ Медиа , Производитель: ЁЁ Медиа ,
- Механика материальных точек твердых, упругих и жидких тел , Вебстер А.Г. , Эта книга создалась из лекций, которые я в продолжение последних четырнадцати лет читал в Clark University, главным образом, для моих слушателей курса физики. Очевидно, что она не… Категория:
Тела в природе бывают свободными и несвободными. Тела, свобода перемещения которых ничем не ограничена, называются свободными. Тела, ограничивающие свободу перемещения других тел, называются по отношению к ним связями .
Одним из основных положений механики является принцип освобождаемости от связей, согласно которому несвободное тело можно рассматривать как свободное, если отбросить действующие на него связи и заменить их силами – реакциями связей.
Очень важно правильно расставить реакции связей, иначе написанные уравнения окажутся неверными. Ниже приведены примеры замены связей их реакциями. На рисунках 1.1–1.8 показаны примеры замены реакциями сил, расположенных в плоскости.

а – тело весом G на гладкой поверхности;
б – действие поверхности заменено реакцией – силой R;
в – в точке А связь «опорная точка» или ребро;
г – реакции направлены перпендикулярно
опираемой или опирающейся плоскостям
Рисунок 1.1
Реакция гладкой поверхности всегда направлена по нормали к этой поверхности (рисунок 1.1). Реакция «невесомого» троса (нити, цепи, стержня) всегда направлена вдоль троса (нити, цепи, стержня) (рисунок 1.2).


Рисунок 1.6
На рисунке 1.7, а изображена бискользящая заделка. В плоскости данная опора допускает поступательное перемещение стержня как по горизонтали, так и по вертикали, но препятствует повороту (в плоскости). Реакцией такой опоры будет момент M C (рисунок 1.7, б).

Рисунок 1.7
Консоль (глухая или жесткая заделка) не допускает никакого перемещения детали. Реакцией такой опоры являются неизвестная по величине и направлению сила R A с углом α (или X A и Y A ) и момент Μ A (рисунок 1.8).

Рисунок 1.8
На рисунках 1.9 – 1.15 показаны примеры замены сил, расположенных в пространстве, их реакциями.
Шарнирно-неподвижная опора, или сферический шарнир (рисунок 1.9, а), заменена системой сил (рисунок 1.9, б) X A , Y A и Z A , т.е. силой, неизвестной по величине и направлению.