Teori tentang perubahan energi kinetik sistem mekanik. Teorema tentang perubahan energi kinetik. Contoh penyelesaian masalah. Undang-Undang Perubahan Energi Mekanik
sistem mekanik
Energi kinetik sistem mekanik disebut jumlah aritmatika dari energi kinetik dari semua titik materialnya
Perhitungan energi kinetik benda padat
1. Gerak translasi
Sebagaimana diketahui, dengan gerak translasi, kecepatan semua titik benda pada saat yang bersamaan adalah sama, maka (83) dapat direpresentasikan dalam bentuk
 .
(84)
.
(84)
Dengan gerakan translasi tubuh, energi kinetiknya sama dengan setengah dari produk massa dengan kuadrat kecepatan pusat massa.
2. Gerak rotasi benda tegar
P  Dengan gerakan rotasi, kecepatan setiap titik tubuh
Dengan gerakan rotasi, kecepatan setiap titik tubuh
 .
(85)
.
(85)
Pengganti (85) di (83):
 .
.
Dengan mempertimbangkan (59), kita peroleh
 .
(86)
.
(86)
Selama gerak rotasi, energi kinetik sama dengan setengah produk momen inersia benda relatif terhadap sumbu rotasi dengan kuadrat kecepatan sudut.
3 ... Gerakan pesawat
Gerak bidang dapat direpresentasikan sebagai rotasi terhadap kutub (misalnya, pusat massa) dan gerak bersama dengan kutub, maka
 .
(87)
.
(87)
Energi kinetik suatu benda yang bergerak bidang sama dengan jumlah energi kinetik dari gerak translasi bersama-sama dengan pusat massa dan gerak rotasi relatif terhadap pusat massa.
Dalil: Perubahan energi kinetik suatu sistem mekanik pada beberapa perpindahannya sama dengan jumlah kerja semua gaya internal dan eksternal sistem pada perpindahan yang sama
 .
(88)
.
(88)
Catatan:
1. Nilai energi kinetik sistem yang diperkenalkan, berbeda dengan momentum sistem dan momentum sudut, adalah besaran skalar. Di mana:
Q= 0 untuk gerakan rotasi dan istirahat;
K HAI= 0 untuk gerak translasi atau diam;
T
Jadi, berbeda dengan teorema tentang perubahan momentum dan momentum sudut, teorema ini cocok untuk mempelajari semua jenis gerak, karena T= 0 hanya untuk sistem stasioner.
2. Berbeda dengan teorema yang disebutkan di atas, teorema ini memperhitungkan aksi gaya internal sistem.
Beberapa kasus perhitungan kerja
1. Kerja momen gayaM Z terhadap sumbu sama dengan hasil kali momen dan sudut rotasi tubuh tentang sumbu
 .
(89)
.
(89)
2. Jumlah kerja gaya-gaya dalam benda yang benar-benar kaku (tidak dapat dideformasi) selalu nol.
3.
Pekerjaan gesekan bergulir .
.
 ,
,
di mana - koefisien gesekan bergulir;
R- radius silinder;
S- panjang busur, sama dengan segmen jalan yang dilalui oleh pusat massa C di sepanjang permukaan;
 - sudut rotasi sumbu silinder selama gerakan;
- sudut rotasi sumbu silinder selama gerakan;
n- reaksi permukaan normal;
P- gravitasi;
F tr- gaya gesekan geser.
Persamaan diferensial untuk gerak translasi, rotasi dan bidang dari benda tegar
1. Gerak translasi
Selama gerak translasi, semua titik benda bergerak sepanjang lintasan yang sama dan pada saat yang sama memiliki percepatan yang sama. Kemudian, untuk menggambarkan gerak, dapat digunakan teorema gerak pusat massa (67). Kami memproyeksikan persamaan ini ke sumbu koordinat
Sistem (90) adalah persamaan diferensial dari gerak translasi benda tegar.
2. Gerakan rotasi
P  mulut benda padat berputar pada sumbu di bawah aksi gaya. Sifat dinamis dari gerak rotasi benda tegar adalah momen kinetik K z, dan karakteristik aksi rotasi gaya adalah momen gaya terhadap sumbu. Oleh karena itu, untuk menggambarkan gerak rotasi benda tegar relatif terhadap sumbu tetap, kita menggunakan teorema perubahan momentum sudut (81)
mulut benda padat berputar pada sumbu di bawah aksi gaya. Sifat dinamis dari gerak rotasi benda tegar adalah momen kinetik K z, dan karakteristik aksi rotasi gaya adalah momen gaya terhadap sumbu. Oleh karena itu, untuk menggambarkan gerak rotasi benda tegar relatif terhadap sumbu tetap, kita menggunakan teorema perubahan momentum sudut (81)
 .
(91)
.
(91)
Gerakan rotasi  , kemudian
, kemudian
 ,
,
mengingat bahwa Saya z= const, sebagai hasilnya kita dapatkan
 .
(92)
.
(92)
Persamaan (92) adalah persamaan diferensial untuk gerak rotasi benda tegar di sekitar sumbu tetap.
Ditemukan sudut akan menentukan posisi tubuh melakukan gerakan rotasi setiap saat.
3. Gerakan pesawat
Posisi benda yang melakukan gerak bidang setiap saat ditentukan oleh posisi tiang dan sudut rotasi benda relatif terhadap tiang. Jika pusat massa benda diambil sebagai kutub, maka persamaan geraknya dapat dicari dengan teorema gerak pusat massa (67), dan gerak rotasi terhadap pusat akan ditentukan dengan persamaan (92), yang juga berlaku untuk gerak sistem terhadap sumbu yang melalui pusat massa. Maka persamaan diferensial gerak bidang benda tegar memiliki bentuk
Bentuk integral (akhir)... Teorema tentang perubahan energi kinetik suatu titik material: perubahan energi kinetik suatu titik material pada beberapa perpindahannya sama dengan jumlah aljabar dari pekerjaan semua gaya yang bekerja pada titik ini pada perpindahan yang sama.
Teorema tentang perubahan energi kinetik sistem mekanik dirumuskan: perubahan energi kinetik suatu sistem mekanik ketika berpindah dari satu posisi ke posisi lain adalah sama dengan jumlah kerja semua kutub eksternal dan internal yang diterapkan pada sistem pada gerakan ini:
Dalam kasus sistem yang tidak dapat diubah, jumlah kerja gaya internal pada setiap perpindahan sama dengan nol (), maka
Hukum kekekalan energi mekanik. Ketika sistem mekanik bergerak di bawah aksi gaya yang memiliki potensial, perubahan energi kinetik sistem ditentukan oleh ketergantungan:
Di mana ,
Jumlah energi kinetik dan energi potensial sistem disebut energi mekanik penuh sistem.
Lewat sini, ketika sistem mekanik bergerak dalam medan potensial stasioner, energi mekanik total sistem selama gerakan tetap tidak berubah.
Tugas. Sistem mekanis di bawah pengaruh gravitasi mulai bergerak dari keadaan diam. Dengan memperhitungkan gesekan geser benda 3, dengan mengabaikan gaya hambatan lain dan massa ulir, dianggap tidak dapat diperpanjang, tentukan kecepatan dan percepatan benda 1 pada saat lintasan yang dilaluinya menjadi sama dengan S(gbr. 3.70).
Dalam tugas, terima:
Larutan. Sistem mekanik ditindaklanjuti oleh gaya aktif,,. Menerapkan prinsip membebaskan sistem dari kendala, kami akan menunjukkan reaksi dari tumpuan tetap berengsel 2 dan permukaan miring yang kasar. Arah kecepatan tubuh sistem akan digambarkan dengan mempertimbangkan fakta bahwa tubuh 1 turun.
Kami memecahkan masalah menggunakan teorema tentang perubahan energi kinetik dari sistem mekanik:
di mana T dan - energi kinetik sistem pada posisi awal dan akhir; - jumlah aljabar dari kerja gaya eksternal yang diterapkan pada sistem, pada pergerakan sistem dari posisi awal ke posisi akhir; - jumlah kerja gaya-gaya dalam sistem pada perpindahan yang sama.
Untuk sistem yang dipertimbangkan, terdiri dari benda yang benar-benar kaku yang dihubungkan oleh ulir yang tidak dapat diperpanjang:
Karena sistem diam pada posisi awal, maka. Karena itu:
Energi kinetik sistem adalah jumlah energi kinetik benda 1, 2, 3:
Energi kinetik beban 1, bergerak translasi, sama dengan:
Energi kinetik balok 2, berputar pada sumbu z, tegak lurus terhadap bidang gambar:
Energi kinetik benda 3 dalam gerak translasinya:
Lewat sini,
Ekspresi untuk energi kinetik mengandung kecepatan yang tidak diketahui dari semua benda dalam sistem. Penting untuk memulai definisi dengan. Mari kita singkirkan hal-hal yang tidak diketahui yang tidak perlu dengan membuat persamaan koneksi.
Persamaan kendala tidak lebih dari hubungan kinematik antara kecepatan dan perpindahan titik dalam sistem. Saat menyusun persamaan kendala, kami akan menyatakan semua kecepatan dan perpindahan yang tidak diketahui dari tubuh sistem dalam hal kecepatan dan perpindahan beban 1.
Kecepatan setiap titik tepi jari-jari kecil sama dengan kecepatan benda 1, serta produk dari kecepatan sudut benda 2 dan jari-jari rotasi R:
Dari sini kita nyatakan kecepatan sudut benda 2:
Kecepatan rotasi titik mana pun dari tepi balok berjari-jari besar, di satu sisi, sama dengan produk dari kecepatan sudut balok dan jari-jari rotasi, dan di sisi lain, kecepatan benda 3:
Mengganti nilai kecepatan sudut, kita mendapatkan:
Setelah mengintegrasikan ekspresi (a) dan (b) di bawah kondisi awal, kami menuliskan rasio perpindahan titik-titik sistem:
Mengetahui ketergantungan dasar kecepatan titik-titik sistem, mari kita kembali ke ekspresi energi kinetik dan substitusikan persamaan (a) dan (b) ke dalamnya:
Momen inersia benda 2 adalah:
Mengganti nilai massa benda dan momen inersia benda 2, kami menulis:
Penentuan jumlah kerja semua gaya luar sistem pada perpindahan tertentu.
Sekarang, menurut teorema tentang perubahan energi kinetik sistem mekanik, kita menyamakan nilainya T dan
Kecepatan tubuh 1 diperoleh dari ekspresi (g)
Percepatan benda 1 dapat ditentukan dengan membedakan persamaan (r) dalam waktu.
Melihat: artikel ini sudah dibaca 49.915 kali
Pdf Pilih bahasa ... Rusia Ukraina Inggris
Ulasan singkat
Seluruh materi diunduh di atas, setelah sebelumnya memilih bahasa
Dua kasus transformasi gerak mekanis suatu titik material atau sistem titik:
- gerakan mekanis dipindahkan dari satu sistem mekanis ke sistem mekanis lainnya sebagai gerakan mekanis;
- gerak mekanik berubah menjadi bentuk lain dari gerak materi (menjadi bentuk energi potensial, panas, listrik, dll).
Ketika transformasi gerak mekanis dianggap tanpa transisi ke bentuk gerak lain, ukuran gerak mekanis adalah vektor momentum titik material atau sistem mekanis. Ukuran aksi gaya dalam hal ini adalah vektor impuls gaya.
Ketika gerakan mekanis berubah menjadi bentuk lain dari gerakan materi, energi kinetik dari suatu titik material atau sistem mekanis bertindak sebagai ukuran gerakan mekanis. Ukuran aksi gaya ketika gerakan mekanis diubah menjadi bentuk gerakan lain adalah kerja gaya
Energi kinetik
Energi kinetik adalah kemampuan tubuh untuk mengatasi rintangan saat bergerak.
Energi kinetik suatu titik material
Energi kinetik suatu titik material adalah besaran skalar yang sama dengan setengah produk massa titik dengan kuadrat kecepatannya.
Energi kinetik:
- mencirikan gerakan translasi dan rotasi;
- tidak tergantung pada arah pergerakan titik-titik sistem dan tidak mencirikan perubahan arah ini;
- mencirikan aksi kekuatan internal dan eksternal.
Energi kinetik sistem mekanik
Energi kinetik sistem sama dengan jumlah energi kinetik benda-benda sistem. Energi kinetik tergantung pada jenis gerak tubuh sistem.
Penentuan energi kinetik benda tegar untuk berbagai jenis gerak.
Energi kinetik gerak translasi
Dalam gerak translasi, energi kinetik benda adalah T=M V2/2.
Massa adalah ukuran kelembaman tubuh selama gerak translasi.
Energi kinetik dari gerakan rotasi tubuh
Selama gerakan rotasi tubuh, energi kinetik sama dengan setengah dari produk momen inersia tubuh relatif terhadap sumbu rotasi dan kuadrat kecepatan sudutnya.
Ukuran inersia suatu benda selama gerak rotasi adalah momen inersia.
Energi kinetik suatu benda tidak bergantung pada arah putaran benda tersebut.
Energi kinetik gerak tubuh bidang-sejajar
Dengan gerakan tubuh yang sejajar bidang, energi kinetiknya adalah
Kerja paksa
Kerja gaya mencirikan aksi gaya pada benda pada perpindahan tertentu dan menentukan perubahan modulus kecepatan titik bergerak.
Pekerjaan dasar kekuatan
Kerja dasar gaya didefinisikan sebagai besaran skalar yang sama dengan hasil kali proyeksi gaya oleh garis singgung lintasan, yang diarahkan ke arah gerak titik, dan perpindahan titik yang sangat kecil, yang diarahkan sepanjang ini. garis singgung.
Kerja paksa pada perpindahan akhir
Usaha gaya pada perpindahan akhir sama dengan jumlah usahanya pada bagian-bagian dasar.
Kerja gaya pada perpindahan akhir M 1 M 0 sama dengan integral sepanjang perpindahan ini dari kerja dasar.
Kerja gaya pada perpindahan M 1 M 2 digambarkan dengan luas gambar yang dibatasi oleh sumbu absis, kurva dan ordinat yang bersesuaian dengan titik M 1 dan M 0.
Satuan ukuran gaya kerja dan energi kinetik dalam SI 1 (J).
Teorema kerja paksa
Teorema 1... Usaha gaya resultan pada perpindahan tertentu sama dengan jumlah aljabar dari usaha gaya-gaya penyusunnya pada perpindahan yang sama.
Teorema 2. Kerja gaya konstan pada perpindahan yang dihasilkan sama dengan jumlah aljabar kerja gaya ini pada perpindahan komponen.
Kekuatan
Daya adalah besaran yang menentukan kerja gaya per satuan waktu.
Satuan pengukuran daya adalah 1W = 1 J / s.
Kasus menentukan kerja gaya
Kerja kekuatan internal
Jumlah kerja gaya-gaya internal benda tegar pada setiap perpindahannya sama dengan nol.
Kerja gravitasi
Kerja gaya elastis
Kerja gaya gesekan
Kerja gaya yang diterapkan pada benda yang berputar
Kerja dasar gaya yang diterapkan pada benda tegar yang berputar di sekitar sumbu tetap adalah sama dengan produk momen utama gaya eksternal relatif terhadap sumbu rotasi dengan peningkatan sudut rotasi.
Tahan berguling
Di zona kontak silinder stasioner dan bidang, deformasi lokal dari kompresi kontak terjadi, tegangan didistribusikan sesuai dengan hukum elips dan garis kerja resultan N dari tegangan ini bertepatan dengan garis aksi beban. gaya pada silinder Q. Saat silinder menggelinding, distribusi beban menjadi asimetris dengan maksimum bergeser ke arah gerak. Resultan N dipindahkan oleh nilai k - lengan gaya gesekan gelinding, yang juga disebut koefisien gesekan gelinding dan memiliki dimensi panjang (cm)
Teorema tentang perubahan energi kinetik suatu titik material
Perubahan energi kinetik suatu titik material pada beberapa perpindahannya sama dengan jumlah aljabar robot dari semua gaya yang bekerja pada titik pada perpindahan yang sama.
Teorema tentang perubahan energi kinetik sistem mekanik
Perubahan energi kinetik sistem mekanik pada perpindahan tertentu sama dengan jumlah aljabar gaya internal dan eksternal robot yang bekerja pada titik material sistem pada perpindahan yang sama.
Teorema tentang perubahan energi kinetik benda tegar
Perubahan energi kinetik benda tegar (sistem tidak berubah) pada perpindahan tertentu sama dengan jumlah gaya luar robot yang bekerja pada titik-titik sistem pada perpindahan yang sama.
Efisiensi
Gaya yang bekerja dalam mekanisme
Gaya dan pasangan gaya (momen) yang diterapkan pada suatu mekanisme atau mesin dapat dibagi menjadi beberapa kelompok:
1. Gaya penggerak dan momen yang melakukan kerja positif (diterapkan pada tautan penggerak, misalnya, tekanan gas pada piston di mesin pembakaran internal).
2. Gaya dan momen hambatan yang melakukan kerja negatif:
- resistensi yang berguna (mereka melakukan pekerjaan yang diperlukan dari mesin dan diterapkan pada tautan yang digerakkan, misalnya, resistensi beban yang diangkat oleh mesin),
- gaya resistensi (misalnya, gaya gesekan, hambatan udara, dll.).
3. Gaya gravitasi dan gaya elastisitas pegas (baik positif maupun negatif bekerja, sedangkan usaha untuk satu siklus penuh sama dengan nol).
4. Gaya dan momen yang diterapkan pada badan atau rak dari luar (reaksi pondasi, dll.), yang tidak melakukan kerja.
5. Gaya interaksi antara tautan, bertindak dalam pasangan kinematik.
6. Gaya-gaya inersia penghubung, yang disebabkan oleh massa dan gerakan mata rantai dengan percepatan, dapat melakukan kerja positif, negatif dan tidak melakukan kerja.
Kerja gaya dalam mekanisme
Dalam keadaan operasi mesin yang stabil, energi kinetiknya tidak berubah dan jumlah kerja dari gaya penggerak dan gaya hambatan yang diterapkan padanya sama dengan nol.
Usaha yang dikeluarkan untuk mengatur mesin agar bergerak dihabiskan untuk mengatasi hambatan yang berguna dan yang merugikan.
Efisiensi mekanisme
Efisiensi mekanis dalam gerakan tetap sama dengan rasio kerja berguna mesin dengan kerja yang dihabiskan untuk mengatur mesin agar bergerak:
Elemen mesin dapat dihubungkan secara seri, paralel dan campuran.
Efisiensi dalam koneksi seri
Dengan serangkaian mekanisme koneksi, efisiensi keseluruhan kurang dengan efisiensi terendah dari mekanisme individu.
Efisiensi dengan koneksi paralel
Dengan koneksi paralel mekanisme, efisiensi keseluruhan lebih besar dari yang terendah dan kurang dari efisiensi tertinggi dari mekanisme individu.
Format: pdf
Bahasa: Rusia, Ukraina
Contoh menghitung gigi pacu
Contoh perhitungan gigi pacu. Pemilihan bahan, perhitungan tegangan yang diizinkan, perhitungan kekuatan kontak dan lentur dilakukan.
Contoh penyelesaian masalah pembengkokan balok
Dalam contoh, diagram gaya geser dan momen lentur dibangun, bagian berbahaya ditemukan dan balok-I dipilih. Masalah menganalisis konstruksi diagram menggunakan dependensi diferensial, analisis komparatif berbagai penampang balok dilakukan.
Contoh penyelesaian masalah torsi poros
Tugasnya adalah memeriksa kekuatan poros baja untuk diameter, material, dan tegangan yang diizinkan. Selama penyelesaian, diagram torsi, tegangan geser dan sudut torsi diplot. Berat mati poros tidak diperhitungkan.
Contoh penyelesaian masalah tegangan-kompresi batang
Tugasnya adalah memeriksa kekuatan batang baja pada tegangan ijin yang diberikan. Selama penyelesaian, diagram gaya longitudinal, tegangan normal dan perpindahan diplot. Berat sendiri batang tidak diperhitungkan.
Penerapan teorema kekekalan energi kinetik
Contoh penyelesaian masalah penerapan teorema kekekalan energi kinetik sistem mekanik
Energi besaran fisis skalar disebut, yang merupakan ukuran tunggal dari berbagai bentuk gerak materi dan ukuran transisi gerak materi dari satu bentuk ke bentuk lainnya.
Untuk mengkarakterisasi berbagai bentuk gerak materi, jenis energi yang sesuai diperkenalkan, misalnya: mekanik, internal, energi elektrostatik, interaksi intranuklear, dll.
Energi mematuhi hukum kekekalan, yang merupakan salah satu hukum alam yang paling penting.
Energi mekanik E mencirikan gerakan dan interaksi benda dan merupakan fungsi dari kecepatan dan pengaturan timbal balik benda. Itu sama dengan jumlah energi kinetik dan potensial.
Energi kinetik
Pertimbangkan kasus ketika tubuh dengan massa M ada gaya konstan \ (~ \ vec F \) (dapat berupa resultan dari beberapa gaya) dan vektor gaya \ (~ \ vec F \) dan perpindahan \ (~ \ vec s \) diarahkan sepanjang satu lurus garis dalam satu arah. Dalam hal ini, kerja gaya dapat didefinisikan sebagai SEBUAH = F∙S... Modulus gaya menurut hukum kedua Newton adalah F = m a, dan modul perpindahan S dengan gerakan bujursangkar yang dipercepat secara seragam, itu terhubung dengan modul-modul awal υ 1 dan terakhir υ 2 kecepatan dan percepatan sebuah ekspresi \ (~ s = \ frac (\ upsilon ^ 2_2 - \ upsilon ^ 2_1) (2a) \).
Dari sini, untuk bekerja, kita mendapatkan
\ (~ A = F \ cdot s = m \ cdot a \ cdot \ frac (\ upsilon ^ 2_2 - \ upsilon ^ 2_1) (2a) = \ frac (m \ cdot \ upsilon ^ 2_2) (2) - \ frac (m \ cdot \ upsilon ^ 2_1) (2) \). (satu)
Besaran fisika yang sama dengan setengah hasil kali massa suatu benda dengan kuadrat kecepatannya disebut energi kinetik tubuh.
Energi kinetik dilambangkan dengan huruf E k.
\ (~ E_k = \ frac (m \ cdot \ upsilon ^ 2) (2) \). (2)
Maka persamaan (1) dapat ditulis sebagai berikut:
\ (~ A = E_ (k2) - E_ (k1) \). (3)
Teorema energi kinetik
kerja gaya resultan yang diterapkan pada benda sama dengan perubahan energi kinetik benda.
Karena perubahan energi kinetik sama dengan kerja gaya (3), energi kinetik benda dinyatakan dalam satuan yang sama dengan usaha, yaitu dalam joule.
Jika kelajuan awal suatu benda bermassa M sama dengan nol dan tubuh meningkatkan kecepatannya ke nilai υ , maka kerja gaya sama dengan nilai akhir energi kinetik benda:
\ (~ A = E_ (k2) - E_ (k1) = \ frac (m \ cdot \ upsilon ^ 2) (2) - 0 = \ frac (m \ cdot \ upsilon ^ 2) (2) \). (4)
Arti fisis energi kinetik
energi kinetik suatu benda yang bergerak dengan kecepatan menunjukkan usaha yang harus dilakukan oleh gaya yang bekerja pada benda yang diam untuk memberikan kecepatan ini padanya.
Energi potensial
Energi potensial Adalah energi interaksi benda-benda.
Energi potensial benda yang diangkat di atas Bumi adalah energi interaksi antara benda dan Bumi oleh gaya gravitasi. Energi potensial benda yang mengalami deformasi elastis adalah energi interaksi masing-masing bagian tubuh satu sama lain oleh gaya elastis.
Potensi disebut kekuatan, yang kerjanya hanya bergantung pada posisi awal dan akhir dari titik atau benda material yang bergerak dan tidak bergantung pada bentuk lintasan.
Dengan lintasan tertutup, usaha gaya potensial selalu nol. Gaya potensial antara lain gaya gravitasi, gaya elastis, gaya elektrostatik, dan beberapa lainnya.
Angkatan yang usahanya bergantung pada bentuk lintasan disebut tidak potensial... Ketika suatu titik material atau benda bergerak sepanjang lintasan tertutup, kerja gaya non-potensial bukanlah nol.
Energi potensial interaksi tubuh dengan Bumi
Mencari kerja yang dilakukan oleh gravitasi F t saat menggerakkan benda bermassa M vertikal turun dari ketinggian H 1 di atas permukaan bumi sampai ketinggian H 2 (gbr. 1). Jika perbedaan H 1 – H 2 diabaikan dibandingkan dengan jarak ke pusat bumi, maka gaya gravitasi F m selama pergerakan tubuh dapat dianggap konstan dan sama mg.
Karena perpindahan bertepatan dalam arah dengan vektor gravitasi, pekerjaan gravitasi adalah
\ (~ A = F \ cdot s = m \ cdot g \ cdot (h_1 - h_2) \). (5)
Sekarang mari kita perhatikan pergerakan benda di sepanjang bidang miring. Ketika tubuh bergerak menuruni bidang miring (Gbr. 2), gaya gravitasi F t = m g melakukan pekerjaan
\ (~ A = m \ cdot g \ cdot s \ cdot \ cos \ alpha = m \ cdot g \ cdot h \), (6)
di mana H- ketinggian bidang miring, S- modulus perpindahan sama dengan panjang bidang miring.

Gerakan tubuh dari satu titik V tepat DENGAN sepanjang lintasan apa pun (Gbr. 3) dapat direpresentasikan secara mental sebagai terdiri dari perpindahan di sepanjang bagian bidang miring dengan ketinggian yang berbeda H’, H'' dll. Kerja SEBUAH gravitasi sepanjang jalan dari V v DENGAN sama dengan jumlah pekerjaan pada bagian trek yang terpisah:
\ (~ A = m \ cdot g \ cdot h "+ m \ cdot g \ cdot h" "+ \ ldots + m \ cdot g \ cdot h ^ n = m \ cdot g \ cdot (h" + h "" + \ ldots + h ^ n) = m \ cdot g \ cdot (h_1 - h_2) \), (7)
di mana H 1 dan H 2 - ketinggian dari permukaan Bumi, di mana masing-masing titik berada V dan DENGAN.
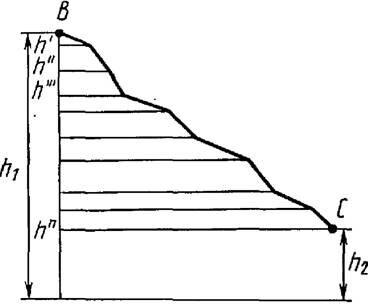
Persamaan (7) menunjukkan bahwa kerja gaya gravitasi tidak bergantung pada lintasan benda dan selalu sama dengan produk modulus gaya gravitasi dengan perbedaan ketinggian pada posisi awal dan akhir.
Saat bergerak ke bawah, kerja gravitasi adalah positif; saat bergerak ke atas, itu negatif. Kerja gravitasi pada lintasan tertutup adalah nol.
Persamaan (7) dapat direpresentasikan sebagai berikut:
\ (~ A = - (m \ cdot g \ cdot h_2 - m \ cdot g \ cdot h_1) \). (delapan)
Kuantitas fisik yang sama dengan produk massa tubuh dengan modulus percepatan gravitasi dan ketinggian di mana tubuh diangkat di atas permukaan bumi disebut energi potensial interaksi tubuh dan bumi.
Kerja gravitasi saat menggerakkan benda bermassa M dari suatu titik yang terletak di ketinggian H 2, ke titik yang terletak di ketinggian H 1 dari permukaan Bumi, sepanjang lintasan apa pun sama dengan perubahan energi potensial interaksi antara tubuh dan Bumi, diambil dengan tanda yang berlawanan.
\ (~ A = - (E_ (p2) - E_ (p1)) \). (9)
Energi potensial ditunjukkan oleh huruf E P.
Nilai energi potensial suatu benda yang diangkat di atas bumi tergantung pada pilihan tingkat nol, yaitu ketinggian di mana energi potensial dianggap nol. Biasanya diasumsikan bahwa energi potensial suatu benda di permukaan bumi adalah nol.
Dengan pilihan tingkat nol ini, energi potensial E p benda pada ketinggian H di atas permukaan bumi, sama dengan produk massa m benda dengan modulus percepatan gravitasi G dan jarak H dari permukaan bumi:
\ (~ E_p = m \ cdot g \ cdot h \). (10)
Arti fisik dari energi potensial interaksi tubuh dengan Bumi
energi potensial tubuh, yang ditindaklanjuti oleh gaya gravitasi, sama dengan pekerjaan yang dilakukan oleh gaya gravitasi ketika tubuh bergerak ke tingkat nol.
Berbeda dengan energi kinetik gerak translasi, yang hanya dapat bernilai positif, energi potensial suatu benda dapat bernilai positif dan negatif. Massa tubuh M di ketinggian H, di mana H < H 0 (H 0 - ketinggian nol), memiliki energi potensial negatif:
\ (~ E_p = -m \ cdot g \ cdot h \).
Energi potensial interaksi gravitasi
Energi potensial interaksi gravitasi sistem dua titik material dengan massa M dan M di kejauhan R satu dari yang lain, sama dengan
\ (~ E_p = G \ cdot \ frac (M \ cdot m) (r) \). (sebelas)
di mana G Apakah konstanta gravitasi, dan nol dari energi potensial ( E p = 0) diadopsi pada R = ∞.
Energi potensial interaksi gravitasi benda dengan massa M dengan bumi dimana H- tinggi badan di atas permukaan bumi, M e adalah massa bumi, R e adalah jari-jari Bumi, dan energi potensial nol dipilih di H = 0.
\ (~ E_e = G \ cdot \ frac (M_e \ cdot m \ cdot h) (R_e \ cdot (R_e + h)) \). (12)
Di bawah kondisi yang sama untuk memilih referensi nol, energi potensial dari interaksi gravitasi benda dengan massa M dengan Bumi untuk ketinggian rendah H (H « R e) sama dengan
\ (~ E_p = m \ cdot g \ cdot h \),
di mana \ (~ g = G \ cdot \ frac (M_e) (R ^ 2_e) \) adalah modulus percepatan gravitasi di dekat permukaan bumi.
Energi potensial dari benda yang mengalami deformasi elastis
Mari kita hitung kerja yang dilakukan oleh gaya elastis ketika deformasi (perpanjangan) pegas berubah dari beberapa nilai awal x 1 ke nilai akhir x 2 (Gbr. 4, b, c).

Gaya elastis berubah saat pegas berubah bentuk. Untuk mencari kerja gaya elastis, Anda dapat mengambil nilai rata-rata modulus gaya (karena gaya elastis secara linier bergantung pada x) dan kalikan dengan modulus perpindahan:
\ (~ A = F_ (upr-cp) \ cdot (x_1 - x_2) \), (13)
di mana \ (~ F_ (upr-cp) = k \ cdot \ frac (x_1 - x_2) (2) \). Dari sini
\ (~ A = k \ cdot \ frac (x_1 - x_2) (2) \ cdot (x_1 - x_2) = k \ cdot \ frac (x ^ 2_1 - x ^ 2_2) (2) \) atau \ (~ A = - \ kiri (\ frac (k \ cdot x ^ 2_2) (2) - \ frac (k \ cdot x ^ 2_1) (2) \ kanan) \). (14)
Besaran fisika yang sama dengan setengah hasil kali kekakuan suatu benda dengan kuadrat deformasinya disebut energi potensial tubuh cacat elastis:
\ (~ E_p = \ frac (k \ cdot x ^ 2) (2) \). (15)
Dari rumus (14) dan (15) berikut bahwa pekerjaan gaya elastis sama dengan perubahan energi potensial dari benda yang mengalami deformasi elastis, diambil dengan tanda yang berlawanan:
\ (~ A = - (E_ (p2) - E_ (p1)) \). (enambelas)
Jika x 2 = 0 dan x 1 = x, maka, seperti dapat dilihat dari rumus (14) dan (15),
\ (~ E_p = A \).
Arti fisik dari energi potensial dari tubuh yang cacat
energi potensial dari benda yang mengalami deformasi elastis sama dengan kerja yang dilakukan oleh gaya elastis selama transisi benda ke keadaan di mana deformasi adalah nol.
Energi potensial mencirikan benda yang berinteraksi, dan energi kinetik mencirikan benda yang bergerak. Perubahan energi potensial dan kinetik hanya sebagai akibat dari interaksi benda tersebut, di mana gaya yang bekerja pada benda melakukan pekerjaan selain nol. Mari kita perhatikan pertanyaan tentang perubahan energi selama interaksi benda-benda yang membentuk sistem tertutup.
Sistem tertutup Apakah sistem yang tidak terpengaruh oleh gaya eksternal atau aksi gaya-gaya ini dikompensasi... Jika beberapa benda berinteraksi satu sama lain hanya oleh gaya gravitasi dan gaya elastis dan tidak ada gaya eksternal yang bekerja padanya, maka untuk setiap interaksi benda, kerja gaya elastis atau gaya gravitasi sama dengan perubahan energi potensial benda, diambil dengan tanda yang berlawanan:
\ (~ A = - (E_ (p2) - E_ (p1)) \). (17)
Menurut teorema energi kinetik, kerja gaya yang sama sama dengan perubahan energi kinetik:
\ (~ A = E_ (k2) - E_ (k1) \). (delapan belas)
Dari perbandingan persamaan (17) dan (18), dapat dilihat bahwa perubahan energi kinetik benda dalam sistem tertutup sama nilainya dengan perubahan energi potensial sistem benda dan berlawanan untuk itu dalam tanda:
\ (~ E_ (k2) - E_ (k1) = - (E_ (p2) - E_ (p1)) \) atau \ (~ E_ (k1) + E_ (p1) = E_ (k2) + E_ (p2) \). (sembilan belas)
Hukum kekekalan energi dalam proses mekanis:
jumlah energi kinetik dan potensial benda yang membentuk sistem tertutup dan berinteraksi satu sama lain oleh gaya gravitasi dan gaya elastisitas, tetap konstan.
Jumlah energi kinetik dan energi potensial benda disebut energi mekanik penuh.
Berikut adalah eksperimen paling sederhana. Ayo lempar bola baja. Setelah menginformasikan kecepatan awal mulai, kami akan memberikannya energi kinetik, karena itu ia akan mulai naik ke atas. Aksi gravitasi menyebabkan penurunan kecepatan bola, dan karenanya energi kinetiknya. Tetapi bola naik lebih tinggi dan lebih tinggi dan memperoleh lebih banyak energi potensial ( E p = m g h). Dengan demikian, energi kinetik tidak hilang tanpa bekas, melainkan diubah menjadi energi potensial.
Pada saat mencapai titik puncak lintasan ( υ = 0) bola benar-benar kehilangan energi kinetik ( E k = 0), tetapi pada saat yang sama energi potensialnya menjadi maksimum. Kemudian bola mengubah arah geraknya dan bergerak ke bawah dengan kecepatan yang meningkat. Sekarang transformasi terbalik dari energi potensial menjadi energi kinetik terjadi.
Hukum kekekalan energi mengungkapkan arti fisik konsep bekerja:
pekerjaan gaya gravitasi dan gaya elastis, di satu sisi, sama dengan peningkatan energi kinetik, dan di sisi lain, dengan penurunan energi potensial benda. Akibatnya, kerja sama dengan energi yang diubah dari satu jenis ke jenis lainnya.
Undang-Undang Perubahan Energi Mekanik
Jika sistem benda yang berinteraksi tidak tertutup, maka energi mekaniknya tidak kekal. Perubahan energi mekanik dari sistem seperti itu sama dengan kerja gaya eksternal:
\ (~ A_ (vn) = \ Delta E = E - E_0 \). (dua puluh)
di mana E dan E 0 - energi mekanik total sistem dalam keadaan akhir dan awal, masing-masing.
Contoh dari sistem tersebut adalah sistem di mana gaya non-potensial bekerja bersama dengan gaya potensial. Gaya non-potensial termasuk gaya gesekan. Dalam kebanyakan kasus, ketika sudut antara gaya gesekan F R tubuh adalah π radian, usaha gaya gesekan adalah negatif dan sama dengan
\ (~ A_ (tr) = -F_ (tr) \ cdot s_ (12) \),
di mana S 12 - jalur tubuh antara titik 1 dan 2.
Gaya gesekan selama gerakan sistem mengurangi energi kinetiknya. Akibatnya, energi mekanik dari sistem non-konservatif tertutup selalu berkurang, berubah menjadi energi bentuk gerak non-mekanis.
Misalnya, sebuah mobil yang bergerak di sepanjang bagian jalan yang horizontal, setelah mematikan mesin, menempuh jarak tertentu dan berhenti di bawah pengaruh gaya gesekan. Energi kinetik gerak translasi kendaraan menjadi nol, dan energi potensial tidak bertambah. Selama pengereman kendaraan, terjadi pemanasan pada bantalan rem, ban kendaraan dan aspal. Akibatnya, sebagai akibat dari aksi gaya gesekan, energi kinetik mobil tidak hilang, tetapi berubah menjadi energi internal dari gerakan termal molekul.
Hukum kekekalan dan transformasi energi
dalam setiap interaksi fisik, energi diubah dari satu bentuk ke bentuk lainnya.
Terkadang sudut antara gaya gesekan F tr dan perpindahan dasar R adalah nol dan usaha gaya gesekan adalah positif:
\ (~ A_ (tr) = F_ (tr) \ cdot s_ (12) \),
Contoh 1... Biarkan, kekuatan eksternal F beraksi di bar V yang bisa meluncur di gerobak D(gambar 5). Jika kereta bergerak ke kanan, maka kerja gaya gesekan geser F tr2 yang bekerja pada troli dari sisi batang adalah positif:

Contoh 2... Ketika roda menggelinding, gaya gesekan menggelinding diarahkan sepanjang gerakan, karena titik kontak roda dengan permukaan horizontal bergerak ke arah yang berlawanan dengan arah gerakan roda, dan kerja gaya gesekan adalah positif. (Gbr. 6):

literatur
- O.F. Kabardin Fisika: Ref. bahan: Buku teks. manual untuk siswa. - M.: Pendidikan, 1991 .-- 367 hal.
- Kikoin I.K., Kikoin A.K. Fisika: Buku teks. untuk 9 cl. Rabu shk. - M.: Pro-sveshenie, 1992 .-- 191 hal.
- Buku teks fisika dasar: Buku teks. tunjangan. Dalam 3 volume / Ed. G.S. Landsberg: jilid 1. Mekanika. Panas. Fisika molekuler. - M.: Fizmatlit, 2004 .-- 608 hal.
- Yavorskiy B.M., Seleznev Yu.A. Panduan referensi fisika untuk pelamar universitas dan pendidikan mandiri. - M.: Nauka, 1983 .-- 383 hal.
Jika kita mempertimbangkan beberapa titik dari sistem dengan massa , memiliki kecepatan , maka untuk titik ini akan ada
![]() ,
,
dimana dan - kerja dasar dari gaya-gaya luar dan dalam yang bekerja pada suatu titik. Menyusun persamaan tersebut untuk setiap titik dari sistem dan menambahkannya istilah demi istilah, kami memperoleh
![]() ,
,
![]() . (2)
. (2)
Persamaan menyatakan teorema tentang perubahan energi kinetik suatu sistem dalam bentuk diferensial.
Jika ekspresi yang dihasilkan terkait dengan interval waktu dasar selama perpindahan yang dipertimbangkan terjadi, kita dapat memperoleh formulasi kedua untuk bentuk diferensial teorema: turunan waktu dari energi kinetik sistem mekanik sama dengan jumlah dari kekuatan semua kekuatan eksternal () dan internal (), yaitu
Bentuk diferensial dari teorema perubahan energi kinetik dapat digunakan untuk menyusun persamaan diferensial gerak, tetapi ini jarang dilakukan, karena ada trik yang lebih mudah.
Setelah mengintegrasikan kedua sisi persamaan (2) dalam batas-batas yang sesuai dengan perpindahan sistem dari beberapa posisi awal, di mana energi kinetik sama, ke posisi di mana nilai energi kinetik menjadi sama , akan memiliki
Persamaan yang dihasilkan mengungkapkan teorema tentang perubahan energi kinetik dalam bentuk akhir: perubahan energi kinetik sistem dengan beberapa perpindahannya sama dengan jumlah kerja pada perpindahan ini dari semua gaya eksternal dan internal yang diterapkan pada sistem.
Berbeda dengan teorema sebelumnya, gaya internal tidak dikecualikan dalam persamaan. Memang, jika dan adalah gaya interaksi antara titik dan sistem (lihat Gambar 51), maka. Tetapi pada saat yang sama, titik dapat bergerak menuju, dan titik menuju. Pekerjaan masing-masing gaya kemudian akan menjadi positif dan jumlah pekerjaan tidak akan menjadi nol. Contohnya adalah fenomena rollback. Gaya internal (gaya tekanan) yang bekerja baik pada proyektil maupun pada bagian yang menggelinding melakukan kerja positif di sini. Jumlah dari usaha-usaha ini, yang tidak sama dengan nol, dan mengubah energi kinetik sistem dari nilai di awal tembakan ke nilai di akhir.
Contoh lain: dua titik dihubungkan oleh pegas. Ketika jarak antara titik berubah, gaya elastis yang diterapkan pada titik akan melakukan pekerjaan. Tetapi jika sistem terdiri dari benda-benda yang benar-benar kaku dan hubungan di antara mereka tidak dapat diubah, tidak elastis, ideal, maka pekerjaan gaya internal akan sama dengan nol dan mereka dapat diabaikan dan tidak ditampilkan sama sekali pada diagram desain.
Pertimbangkan dua kasus khusus yang penting.
1) Sistem yang tidak dapat diubah. Kekal kita akan menyebut sistem di mana jarak antara titik penerapan gaya internal tidak berubah ketika sistem bergerak. Secara khusus, sistem seperti itu adalah tubuh yang benar-benar kaku atau utas yang tidak dapat diperpanjang.

Gambar 51
Biarkan dua titik dan sistem yang tidak berubah (Gbr. 51) bekerja satu sama lain dengan gaya dan () memiliki kecepatan dan pada momen tertentu. Kemudian untuk jangka waktu tertentu dt titik-titik ini akan membuat gerakan dasar dan , diarahkan sepanjang vektor dan. Tetapi karena segmen tidak dapat diubah, maka, menurut teorema kinematika yang terkenal, proyeksi vektor dan , dan, akibatnya, perpindahan dan arah segmen akan sama satu sama lain, yaitu. ... Kemudian pekerjaan dasar gaya dan akan sama besarnya dan berlawanan tanda, dan secara total mereka akan memberikan nol. Hasil ini berlaku untuk semua gaya internal untuk setiap perpindahan sistem.
Oleh karena itu kami menyimpulkan bahwa untuk sistem yang tidak dapat diubah, jumlah kerja semua gaya internal adalah nol dan persamaan mengambil bentuk
2) Sistem yang digabungkan dengan sempurna... Pertimbangkan sistem yang dilapisi dengan koneksi yang tidak berubah seiring waktu. Mari kita bagi semua gaya eksternal dan internal yang bekerja pada titik-titik sistem menjadi aktif dan reaksi ikatan. Kemudian
![]() ,
,
di mana pekerjaan dasar dari mereka yang bertindak? k- titik sistem gaya aktif eksternal dan internal, a adalah kerja dasar dari reaksi yang dikenakan pada titik yang sama dari koneksi eksternal dan internal.
Seperti yang Anda lihat, perubahan energi kinetik sistem bergantung pada usaha dan gaya aktif serta reaksi ikatan. Namun, dimungkinkan untuk memperkenalkan konsep sistem mekanis "ideal" seperti itu, di mana keberadaan ikatan tidak mempengaruhi perubahan energi kinetik sistem selama gerakannya. Untuk sambungan seperti itu, kondisi berikut jelas harus dipenuhi:
Jika untuk hubungan yang tidak berubah terhadap waktu, jumlah kerja semua reaksi dengan perpindahan elementer sistem sama dengan nol, maka hubungan seperti itu disebut sempurna. Untuk sistem mekanis, di mana hanya kendala ideal yang tidak berubah dengan waktu yang dikenakan, kita jelas akan memiliki
Jadi, perubahan energi kinetik sistem dengan ikatan ideal yang tidak berubah dari waktu ke waktu untuk setiap perpindahannya sama dengan jumlah pekerjaan pada perpindahan ini yang diterapkan pada sistem eksternal dan internal. kekuatan aktif.
Sistem mekanik disebut konservatif(energinya, seolah-olah, kekal, tidak berubah) jika integral energi
![]() atau (3)
atau (3)
Dia hukum kekekalan energi mekanik: ketika sistem bergerak dalam medan potensial, energi mekaniknya (jumlah potensial dan kinetik) tetap tidak berubah, konstan sepanjang waktu.
Suatu sistem mekanik akan konservatif jika gaya-gaya yang bekerja padanya adalah potensial, misalnya gaya gravitasi, gaya elastik. Dalam sistem mekanik konservatif, dengan menggunakan integral energi, orang dapat memeriksa kebenaran persamaan diferensial gerak. Jika sistem konservatif, dan kondisi (3) tidak terpenuhi, maka terjadi kesalahan dalam perumusan persamaan gerak.
Integral energi dapat digunakan untuk memeriksa kebenaran persamaan dan dengan cara lain, tanpa menghitung turunannya. Untuk melakukan ini, setelah melakukan integrasi numerik dari persamaan gerak, hitung nilai energi mekanik total untuk dua titik waktu yang berbeda, misalnya titik awal dan titik akhir. Jika perbedaan nilai ternyata sebanding dengan kesalahan perhitungan, ini akan menunjukkan kebenaran persamaan yang digunakan.
Semua teorema sebelumnya memungkinkan untuk mengecualikan gaya internal dari persamaan gerak, tetapi semua gaya eksternal, termasuk reaksi koneksi eksternal yang sebelumnya tidak diketahui, tetap dalam persamaan. Nilai praktis dari teorema tentang perubahan energi kinetik adalah bahwa, dengan kendala ideal yang tidak berubah seiring waktu, itu akan memungkinkan kita untuk mengecualikan dari persamaan gerak semua reaksi ikatan yang sebelumnya tidak diketahui.